Tecnologia e funzionamento dei sensori di distanza ottici
Tecnologia e funzionamento dei sensori di distanza ottici
How does a laser distance sensor work?
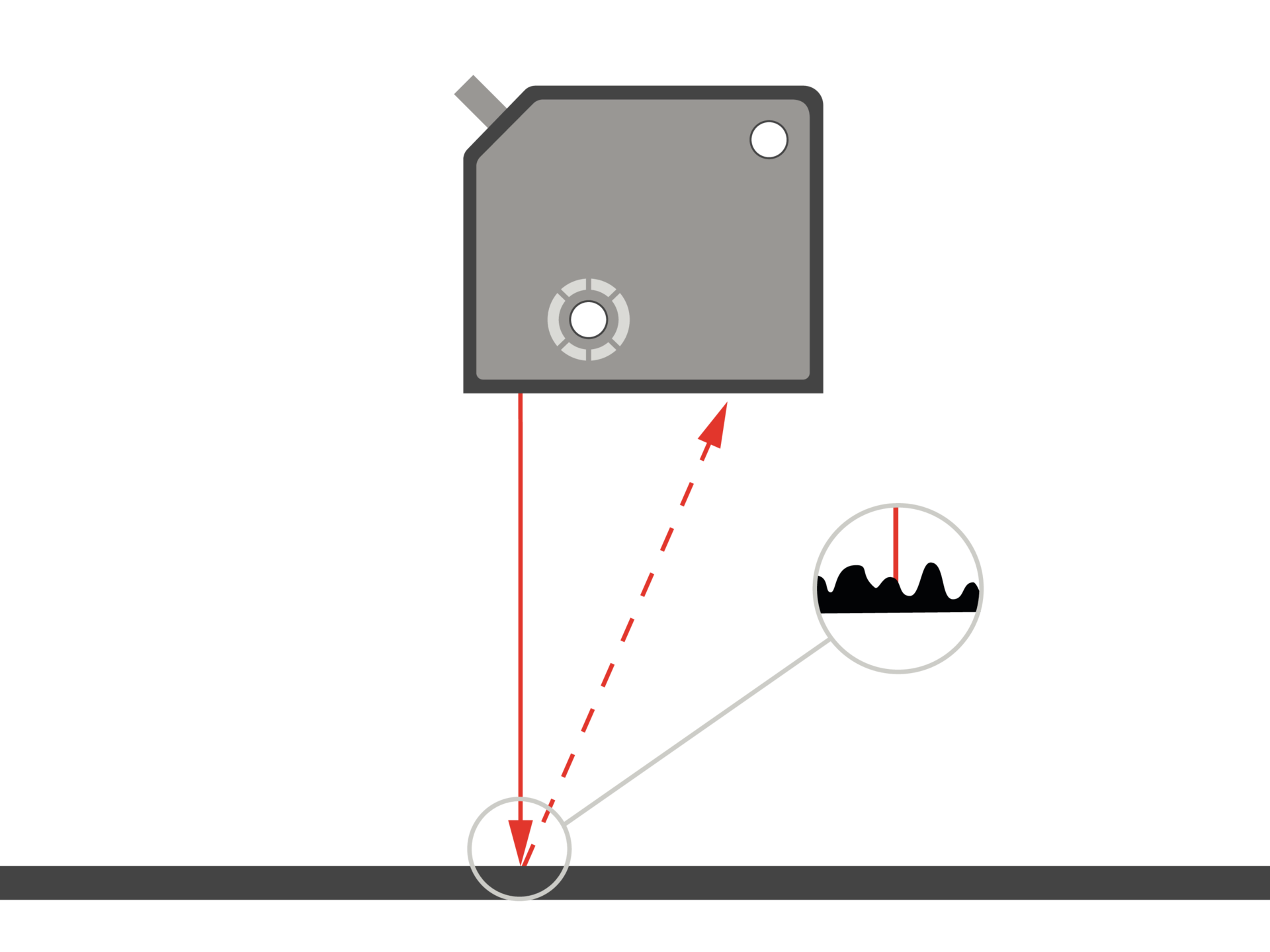
Il fascio di luce urta l’oggetto come piccolo punto. Il ricevitore del sensore (array di fotodiodi) rileva la posizione di tale punto. In base alla distanza cambia l’angolo di incidenza e quindi la posizione del punto luminoso sul ricevitore. L’array di fotodiodi viene letto da un microcontrollore integrato. In base alla distribuzione delle luce sull’array di fotodiodi, il controller calcola esattamente l’angolo e, in base a questo, calcola la distanza dall’oggetto. Tale distanza vene trasmessa alla porta seriale o convertita in una corrente di uscita proporzionale alla distanza. Il microcontrollore garantisce l’elevata linearità e precisione di misura. La combinazione di array di fotodiodi e microcontrollore consente la soppressione dei riflessi di disturbo restituendo così dati affidabili su superfici critiche. Il sensore si adatta a diversi colori modificando la sua sensibilità interna, condizione che lo rende pressoché indipendente in riferimento al colore dell’oggetto. Un’uscita digitale viene attivata se all’interno del range di misura non è presente alcun oggetto o se non viene ricevuta abbastanza luce per rilevare un oggetto correttamente se, ad esempio, il sensore è imbrattato. La possibile risoluzione e la precisione variano con la distanza. La stessa distanza Δd, che vicino al sensore provoca una variazione angolare elevata α1, a distanza ne provoca una molto più piccola α2 (vedi disegno). Questo comportamento non lineare viene corretto dal microcontrollore affinché il segnale di uscita si muova lineare alla distanza.
Il fascio di luce urta l’oggetto come piccolo punto. Il ricevitore del sensore (array di fotodiodi) rileva la posizione di tale punto. In base alla distanza cambia l’angolo di incidenza e quindi la posizione del punto luminoso sul ricevitore. L’array di fotodiodi viene letto da un microcontrollore integrato. In base alla distribuzione delle luce sull’array di fotodiodi, il controller calcola esattamente l’angolo e, in base a questo, calcola la distanza dall’oggetto. Tale distanza vene trasmessa alla porta seriale o convertita in una corrente di uscita proporzionale alla distanza. Il microcontrollore garantisce l’elevata linearità e precisione di misura. La combinazione di array di fotodiodi e microcontrollore consente la soppressione dei riflessi di disturbo restituendo così dati affidabili su superfici critiche. Il sensore si adatta a diversi colori modificando la sua sensibilità interna, condizione che lo rende pressoché indipendente in riferimento al colore dell’oggetto. Un’uscita digitale viene attivata se all’interno del range di misura non è presente alcun oggetto o se non viene ricevuta abbastanza luce per rilevare un oggetto correttamente se, ad esempio, il sensore è imbrattato. La possibile risoluzione e la precisione variano con la distanza. La stessa distanza Δd, che vicino al sensore provoca una variazione angolare elevata α1, a distanza ne provoca una molto più piccola α2 (vedi disegno). Questo comportamento non lineare viene corretto dal microcontrollore affinché il segnale di uscita si muova lineare alla distanza.
In una misurazione della distanza, il sensore è immediatamente pronto all’uso e fornisce la distanza dal sensore all’oggetto. Il valore misurato può, ad esempio, essere impiegato per il posizionamento accurato degli oggetti o nella regolazione di un impianto. Facoltativamente è possibile parametrare un’uscita digitale.
Se, ad esempio, occorre verificare la stabilità dimensionale degli oggetti, tramite l’apprendimento di un riferimento è possibile rilevare direttamente una misurazione di tolleranza e quindi lo scostamento dalla dimensione nominale. Anche in questo caso è possibile parametrare un’uscita digitale corrispondente.
Conformazioni del fascio
Oltre alle svariate dimensioni e portate, soprattutto la conformazione del fascio riveste un ruolo importante. La continua evoluzione consente a Baumer di offrire ora tre diverse conformazioni del fascio all’interno del suo portfolio con il nuovo principio di misurazione “multi-spot”:
Misurazioni stabili con oltre 600 valori misurati su superfici molto ruvide o lucide in modo non omogeneo grazie a una linea laser estremamente lunga < 300 mm.
Gli algoritmi efficienti, integrati nel sensore rendono i sensori di distanza a laser estremamente resistenti a sorgenti luminose esterne. Ciò garantisce un esercizio più robusto e sicuro dal punto di vista del processo.
I sensori di distanza ottici di Baumer si adattano automaticamente ai diversi colori degli oggetti e ai diversi livelli di luminosità modificando l’intensità di emissione ed ottimizzando la durata di esposizione. Questo li rende indipendenti dal fattore di riflessione di un oggetto. Sono possibili anche misurazioni su oggetti con una reflettività fino al 2%.
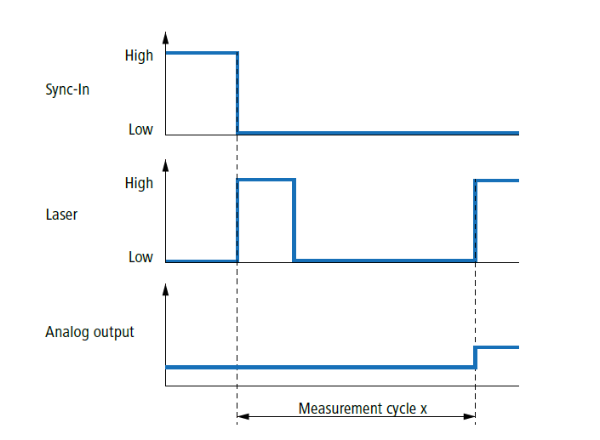
L’ingresso Synch-in consente di sincronizzare le misurazioni di diversi sensori. Con una misurazione dello spessore, è possibile attivare contemporaneamente due sensori nella modalità sincrona tramite l’ apposito ingresso. Nella modalità asincrona, invece, i diversi sensori a effetti reciproci di disturbo in un’applicazione vengono consapevolmente azionati in successione temporale.
L’attivazione dei filtri consente di ridurre il rumore del segnale di uscita e quindi di aumentare la risoluzione. Un filtro viene utilizzato anche per sopprimere gli errori di misurazione. L’uscita cambia solo dopo un numero definito di valori misurati. La frequenza di misurazione non viene influenzata da tale filtro, ma il tempo di risposta. La funzione di filtro può essere parametrata selezionando modalità di precisione predefinite.
Il range di misura può essere corretto dall’utente entro quello massimo con il tasto teach, tramite il cavo teach o dal display. L’uscita analogica dispone di una sua corsa completa all’interno di questo intervallo appreso e quindi presenta una precisione di misura superiore. L’impostazione di fabbrica e il range di misura massimo.
Un’uscita di commutazione deve attivarsi non appena un valore misurato definito viene superato o non raggiunto. Per un segnale di commutazione affidabile è possibile parametrare l’isteresi (differenza tra punto di commutazione e punto di reinserzione) assolutamente in millimetri. È garantito un esercizio sicuro dell’impianto indipendentemente dalla posizione dell’oggetto nel campo di misura.
Time of flight (misurazione della durata)
With the time-of-flight measurement method distances are measured indirectly by measuring the time required by a signal to travel the length of the range to be covered. This translates into the real world as follows: a sender unit is emitting a burst signal which, when reflected by an object, is picked up by the sensor's receiver. The sensor's electronics evaluates the time elapsed and/or the phase-shift encountered which is then converted into distance information. By applying the run time technology objects can be detected precisely and reliably even at long distances.
Riconoscimento affidabile dell’oggetto anche in caso di oggetti completamente neri, riflettenti, lucidi o dalla forma irregolare indipendentemente dall’angolo di montaggio
Ampio campo di rilevamento fino a 2,6 m grazie alla misura del tempo di percorrenza della luce
Semplice integrazione e rapida parametrizzazione mediante l’interfaccia IO-Link standardizzata