A
Assorbimento di corrente
L’assorbimento di corrente massimo a condizioni nominali, la corrente di inserimento può quindi essere maggiore per qualche ms.
C
Carico
Resistenza di carico massima di un’uscita in corrente. Il carico è la resistenza di misurazione (resistenza di ingresso della scheda di misurazione analogica) per convertire la corrente del segnale in una tensione misurabile.
Classe di protezione DIN EN 60529
La classe di protezione indica in che misura il sensore è protetto dall’umidità, dalla polvere e dalla penetrazione di corpi esterni.
Coppia limite
Coppia ammessa intorno all’asse di misurazione del sensore di forza che non causa variazioni significative costanti alle caratteristiche tecniche di misurazione del sensore di forza con contestuale sollecitazione a forza nominale.
D
Deformazione nominale
La deformazione nominale è la deformazione per cui il sensore è concepito a livello nominale, ovvero fino a cui vengono rispettate le specifiche tecniche di misurazione. Nelle indicazioni seguenti, il dato percentuale si riferisce sempre alla deformazione nominale.
F
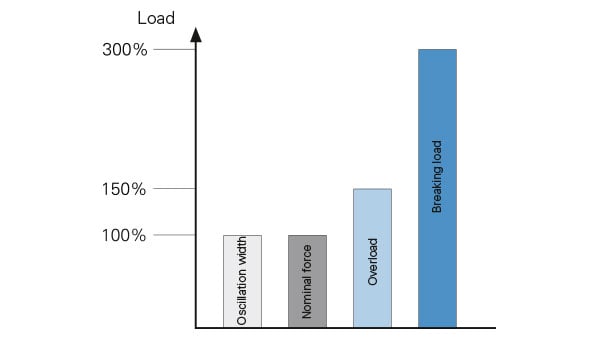
Forza di rottura minima
La forza di rottura minima descrive la forza del sensore di forza a partire da cui occorre considerare una distruzione meccanica. In caso di sollecitazione oltre la forza di rottura minima si suggerisce di non riutilizzare più il sensore.
Forza nominale
La forza nominale è la forza per cui il sensore è concepito a livello nominale, ovvero fino a cui vengono rispettate le specifiche tecniche di misurazione. In base al tipo è possibile distinguere tra forza nominale di pressione e trazione. Nelle indicazioni seguenti, il dato percentuale si riferisce sempre alla forza nominale.
Forza trasversale limite
Forza trasversale statica ammessa che non causa variazioni significative costanti alle caratteristiche tecniche di misurazione del sensore di forza con contestuale sollecitazione a forza nominale.
Frequenza di risonanza di base
Frequenza di risonanza con cui il sensore di forza senza carico né punti di applicazione della forza oscilla in direzione dell’asse di misurazione in base all’eccitazione impulsiva mentre la sua base prevista per il fissaggio è collegata a una massa idonea.
Frequenza limite
Con questa frequenza, il segnale di uscita viene attenuato di 3 dB (a circa il 70,7%).
I
Immunità elettromagnetica
Direttiva/Norma sull’immunità alle interferenze, sulle emissioni elettromagnetiche e irradiazioni.
Impulso di taratura
L’impulso di taratura è il tempo minimo in cui occorre superare il valore \(U_{Ta}\) per avviare la taratura.
Intervallo di taratura
Entro questo intervallo, il sensore è in grado di eseguire una taratura e di impostare il segnale di uscita sul segnale zero.
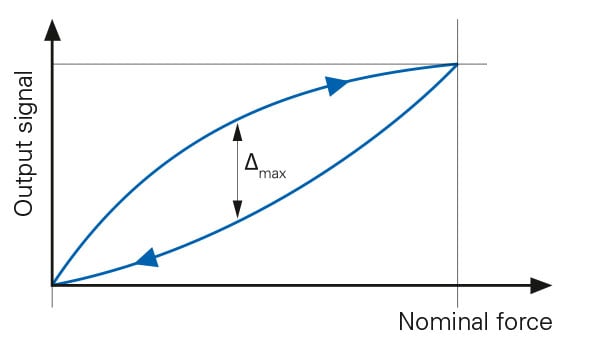
Isteresi
Per isteresi o nella letteratura nota anche come errore di inversione si intende la differenza dei segnali di uscita di una serie ascendente e discendente alla stessa sollecitazione, riferita al segnale di uscita con aumento del carico in condizioni di montaggio ideali. Fattori di influenza sono l’isteresi del materiale del corpo sensore, l’isteresi del principio di misurazione e gli influssi di attrito esterno dovuto alla struttura di misurazione.
L
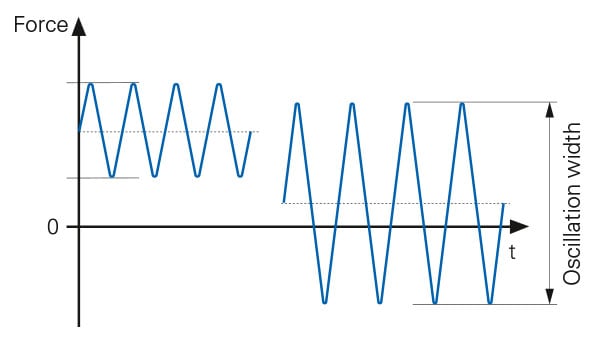
Limite di fatica
I limiti di carico riferiti alla forza nominale entro cui il sensore può provare almeno oltre 1 milione di cicli di carico dinamici senza variazioni costanti delle caratteristiche tecniche di misurazione. Nella letteratura si trova spesso anche sotto il termine di ampiezza di sollecitazione relativa.
M
Momento flettente limite
Momento flettente statico ammesso che non causa variazioni significative costanti alle caratteristiche tecniche di misurazione del sensore di forza con contestuale sollecitazione a forza nominale.
P
Percorso di misurazione nominale
Il percorso di misurazione nominale descrive il percorso che seguono i due punti esterni di applicazione della forza o le superfici del sensore di forza reciprocamente in direzione di misurazione in seguito a una sollecitazione con forza nominale. Il percorso di misurazione nominale tipico nel sensore di forza a membrana corrisponde a circa 0,1 mm.
Polarità del segnale positiva
Variazione positiva del segnale di uscita con direzione definita della grandezza di ingresso.
Ponticellamento - Resistenza di ingresso
Resistenza ohmica tra i raccordi di alimentazione +VS e -VS di un rilevatore di misura passivo.
Ponticellamento – Resistenza di uscita
Resistenza ohmica tra le uscite di segnale Sig+ e Sig- di un rilevatore di misura passivo.
Protezione anticorrosione
La protezione anticorrosione descrive, in base a quale categoria di corrosività della norma DIN EN ISO 12944-2, il sensore debba essere utilizzato correttamente a determinate condizioni ambientali.
R
Random DIN EN 60068-2-64
Resistenza del sensore all’oscillazione senza che quest’ultimo subisca variazioni significative costanti alle sue caratteristiche tecniche di misurazione fino alla forza nominale.
Range di temperatura di esercizio
Il range di temperatura di esercizio descrive il range di temperatura in cui il sensore rispetta le caratteristiche tecniche di misurazione.
Range di temperatura di stoccaggio
Range di temperatura in cui il sensore può essere stoccato a livello meccanico ed elettrico senza sollecitazioni e senza che si stabilisca una variazione significativa costante delle sue caratteristiche tecniche di misurazione in caso di riutilizzo del sensore entro il range di temperatura di esercizio.
Range di tensione di esercizio
In questo intervallo di tensione, il sensore può essere azionato in modo costante per l’intero range di temperatura di esercizio senza superare i limiti delle caratteristiche tecniche di misurazione né compromettere il circuito elettrico di protezione.
Resistenza del ponte
Resistenza ohmica dell’intero ponte di misurazione.
Resistenza di carico
Resistenza di ingresso minima del sistema di misurazione collegato.
Resistenza di isolamento
Resistenza ohmica misurata tra un cavo di collegamento qualsiasi e il corpo sensore a una determinata tensione di prova.
Rigidità del sensore
La rigidità del sensore è definita come il rapporto della forza rispetto alla deformazione assiale del corpo sensore. La rigidità del sensore consente di influenzare sensibilmente la frequenza di risonanza di base del sensore.
Ripetibilità
La ripetibilità descrive la precisione del sensore con posizione di installazione invariata. In questo modo viene rilevata la differenza massima dei segnali di uscita aventi la stessa forza tra svariate serie di misurazione in una posizione di installazione invariata. La ripetibilità è particolarmente importante per sensori di forza che vengono montati una sola volta.
Riproducibilità
La ripetibilità descrive la precisione del sensore con posizione di installazione modificata. In questo modo viene rilevata la differenza massima dei segnali di uscita aventi la stessa forza tra svariate serie di misurazione in una posizione di installazione diversa. La riproducibilità è particolarmente importante per sensori di forza che misurano temporaneamente e vengono spesso montati e smontati.
Risoluzione di misurazione
Suddivisione minima possibile dei valori misurati trasmissibili nei sistemi digitali.
Rumore
Valore effettivo del rumore del segnale di uscita nel range di frequenza fornito.
S
Schock DIN EN 60068-2-27
Resistenza del sensore al carico intermittente (shock meccanici) senza che quest’ultimo subisca variazioni significative costanti alle sue caratteristiche tecniche di misurazione fino alla forza nominale.
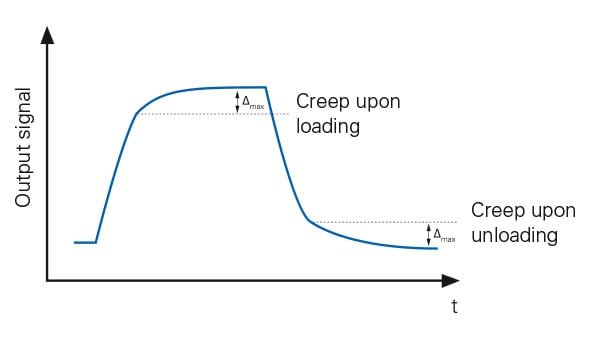
Scorrimento
Lo scorrimento descrive la variazione temporale del segnale di uscita del sensore di forza a carico costante. Si distingue tra scorrimento di carico e di scarico. Nello scorrimento di carico, la variazione del segnale di misura a forza costante viene analizzata per un intervallo prolungato. Nello scorrimento di scarico, il sensore di forza viene precedentemente sollecitato con una forza nominale costante. Dopo lo scarico, la variazione del segnale di misura viene successivamente valutata nello stato scaricato.
Scostamento dal punto zero
Lo scostamento dal punto zero descrive lo scostamento massimo del segnale zero in condizioni di smontaggio dal valore zero riferito al valore caratteristico nominale. Nei sensori di forza inferiori a 100 N occorre verificare che il sensore si trovi su una superficie piana in assenza di forza.
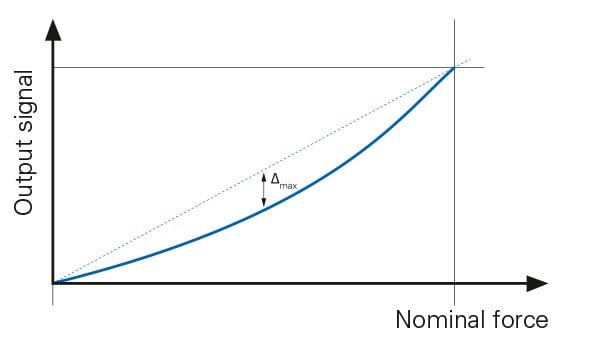
Scostamento di linearità
Lo scostamento di linearità è lo scostamento massimo di una curva caratteristica di un sensore rilevata con l’aumento della forza dalle rette di riferimento passanti per il punto zero in condizioni di montaggio ideali. La retta di riferimento rappresenta una funzione di compensazione di primo grado la cui pendenza viene definita in modo tale che la somma dei quadrati di tutti gli scostamenti di segnale dalle rette di riferimento restituisca un valore minimo (nella letteratura: metodo dei minimi quadrati). La causa principale di uno scostamento di linearità è spesso un’applicazione della forza asimmetrica.
Segnale di uscita
Tipo del segnale di uscita del sensore con amplificatore elettrico. Il segnale di uscita è proporzionale alla forza nominale. Con un sensore di forza da 100 N con uscita di tensione 0 – 10 V, 0 V 0 N e 10 V corrispondono a una forza nominale di 100 N.
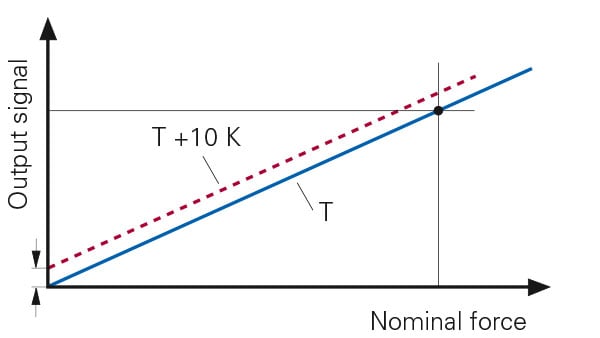
Segnale zero TK
\(TK_{0}\) descrive la variazione riferita al valore caratteristico nominale del segnale zero del sensore di forza in seguito a una variazione della temperatura ambiente \(T_{i}\) di 10 K. Il dato è espresso in % per ogni 10K.
Sovraccarico
Il sovraccarico è la forza entro cui il sensore di forza continua a essere completamente funzionante con una sola sollecitazione e a rispettare le specifiche tecniche. Il sensore non subisce deformazioni plastiche.
T
Taratura attiva
Questa tensione deve essere presente almeno sull’ingresso di taratura per avviare sicuramente una taratura.
Taratura non attiva
Questa tensione non deve essere superata sull’ingresso di taratura per non avviare sicuramente tarature.
Tempo di taratura
Il sensore necessita di questo tempo al massimo per eseguire una taratura.
Tensione del ponte
Tensione di alimentazione stabilizzata per il rilevatore di misura passivo.
Tolleranza di sensibilità/valore caratteristico
Scostamento relativo del valore caratteristico con carico nominale dal valore caratteristico nominale.
V
Valore caratteristico nominale \(U_{E}\)
Segnale di uscita raziometrico di un sensore passivo con forza nominale. Il segnale di uscita è proporzionale alla tensione del ponte \(U_{E}\).
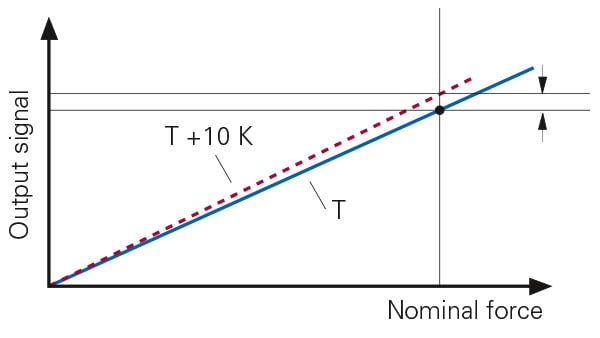
Valore caratteristico TK
\(TK_{E}\) descrive la variazione relativa del valore caratteristico del sensore di forza in seguito a una variazione della temperatura ambiente \(T_{i}\) di 10 K. Il dato è espresso in % per ogni 10K.
Velocità di misurazione
La velocità di misurazione descrive la velocità interna di rilevamento del segnale analogico del sensore.
Vibrazione DIN EN 60068-2-6
Resistenza del sensore ai movimenti oscillatori sinusoidali forzati con grado di definizione senza che vengano stabilite variazioni significative costanti alle sue caratteristiche tecniche di misurazione fino alla forza nominale.