Schweiz
ch
Deutsch

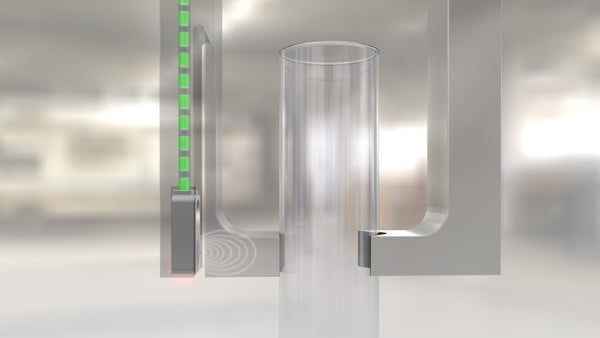
Aufgabe: Indirekte Messung der Greifkraft durch Messung der Verschiebung/ Biegung des entsprechend geformten Greiffingers beim Greifen.