Schweiz
ch
Deutsch

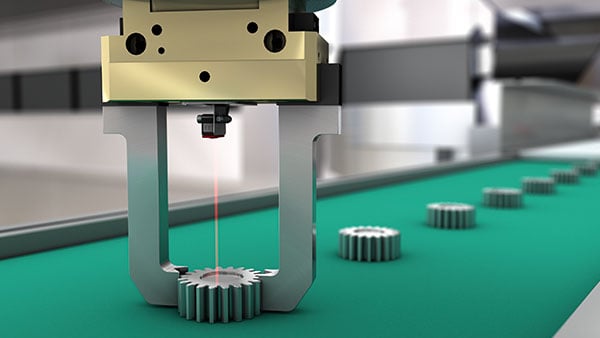
Aufgabe: Erkennen des zu greifenden Bauteils zwischen den Greiferfingern in geöffnetem und geschlossenen Zustand.

