A
Ausgangssignal
Art des Ausgangssignal des Sensors mit elektrischem Verstärker. Das Ausgangssignal ist proportional zur Nennkraft. Bei einem 100 N Kraftsensor mit Spannungsausgang 0 – 10 V, entsprechen 0 V 0 N und 10 V einer Nennkraft von 100 N.
B
Betriebsspannungsbereich
In diesem Spannungsbereich kann der Sensor dauerhaft über den gesamten Betriebstemperaturbereich betrieben werden ohne das die Grenzen der messtechnischen Eigenschaften überschritten werden und es zu einer Beeinträchtigung der elektrischen Schutzschaltung kommt.
Betriebstemperaturbereich
Der Betriebstemperaturbereich beschreibt den Temperaturbereich, in dem der Sensor die messtechnischen Eigenschaften einhält.
Brücken - Ausgangswiderstand
Ohmscher Widerstand zwischen den Signalausgängen Sig+ und Sig- eines passiven Messaufnehmer.
Brücken - Eingangswiderstand
Ohmscher Widerstand zwischen den Versorgungsanschlüssen +VS und -VS eines passiven Messaufnehmer.
Brückenspannung
Stabilisierte Versorgungsspannung für den passiven Messaufnehmer.
Brückenwiderstand
Ohmscher Widerstand der gesamten Messbrücke.
Bürde
Maximaler Lastwiderstand eines Stromausgangs. Die Bürde ist der Messwiderstand (Eingangswiderstand der analogen Messkarte) um den Signalstrom in eine messbare Spannung umzuwandeln.
D
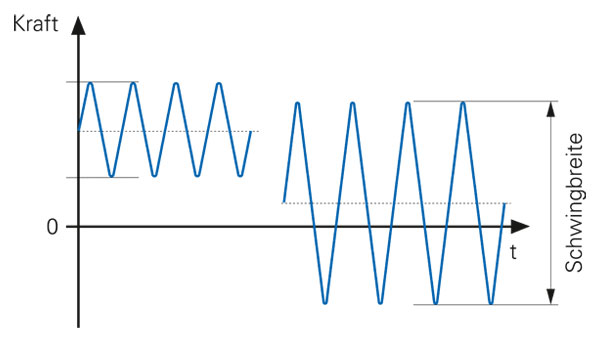
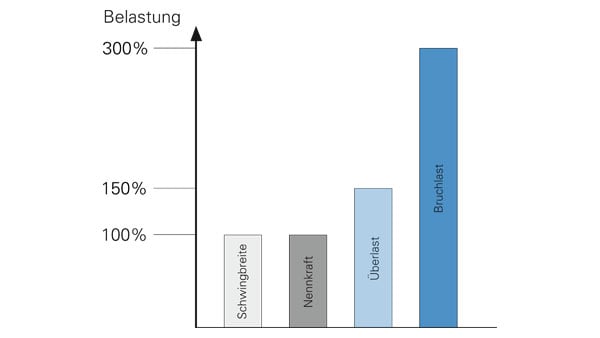
Dauerfestigkeit
Auf die Nennkraft bezogene Belastungsgrenze, bis zu der der Sensor mindestens über 1 Million dynamische Belastungszyklen ohne bleibende Veränderungen der messtechnischen Eigenschaften erfahren kann. In der Literatur auch oft unter dem Begriff der relativen Schwingbreite zu finden.
E
EMV
Richtlinie / Norm über Störfestigkeit, elektromagnetische Emissionen und Einstrahlungen.
G
Grenzbiegemoment
Zulässiges statisches Biegemoment, das bei gleichzeitiger Belastung mit Nennkraft keine bleibenden signifikanten Veränderungen der messtechnischen Eigenschaften des Kraftsensors bewirkt.
Grenzdrehmoment
Zulässiges Drehmoment um die Messachse des Kraftsensors, das bei gleichzeitiger Belastung mit Nennkraft keine bleibenden signifikanten Veränderungen der messtechnischen Eigenschaften des Kraftsensors bewirkt.
Grenzfrequenz
Bei dieser Frequenz wird das Ausgangssignal um 3dB (auf rund 70.7%) gedämpft.
Grenzquerkraft
Zulässige statische Querkraft, die bei gleichzeitiger Belastung mit Nennkraft keine bleibenden signifikanten Veränderungen der messtechnischen Eigenschaften des Kraftsensors bewirkt.
Grundresonanzfrequenz
Resonanzfrequenz mit der der unbelastete Kraftsensor ohne Krafteinleitungsteile nach stossartiger Anregung in Richtung der Messachse schwingt, wobei seine zur Befestigung vorgesehene Basis an eine ausreichende Masse gekoppelt ist.
H
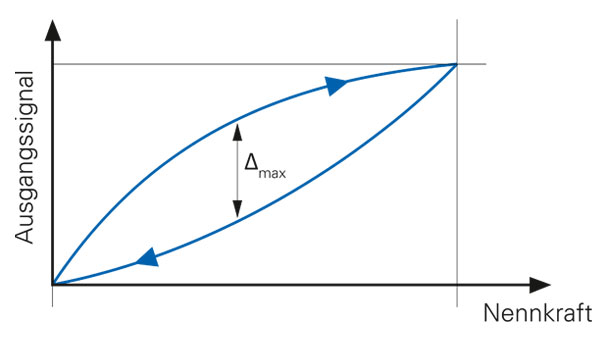
Hysterese
Als Hysterese oder in der Literatur auch als Umkehrspanne bekannt, bezeichnet man die Differenz der Ausgangssignale einer Auf- und Abwärtsreihe bei jeweils gleicher Belastung, bezogen auf das Ausgangssignal bei steigender Last unter idealen Einbaubedingungen. Einflussfaktoren sind die Materialhysterese des Sensorkörpers, die Hysterese im Messprinzip sowie externe Reibungseinflüsse durch den Messaufbau.
I
Isolationswiderstand
Ohmscher Widerstand, gemessen zwischen einer beliebigen Anschlussleitungen und dem Sensorkörper unter einer definierten Prüfspannung.
K
Kennwert-/Empfindlichkeitstoleranz
Relative Abweichung des Kennwerts unter Nennlast vom Nennkennwert.
Korrosionsschutz
Der Korrosionsschutz beschreibt nach welcher Korrosivitätskategorie der DIN EN ISO 12944-2 der Sensor unter bestimmten Umgebungsbedingungen problemlos einzusetzen ist.
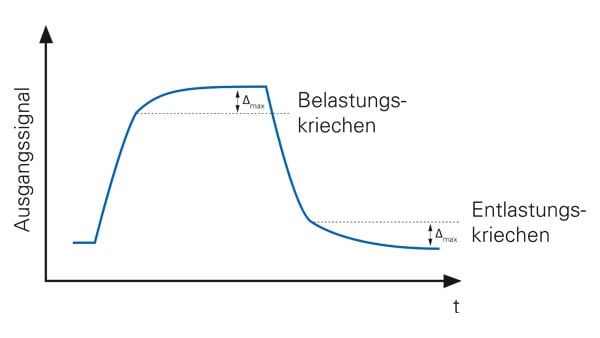
Kriechen
Kriechen beschreibt die zeitabhängige Änderung des Ausgangssignals des Kraftsensors bei konstanter Last. Dabei wird zwischen Belastungs- und Entlastungskriechen unterschieden. Beim Belastungskriechen wird die Änderung des Messsignals bei konstanter Kraft über einen längeren Zeitraum untersucht. Beim Entlastungskriechen wird der Kraftsensor vorgängig mit einer konstanten Nennkraft belastet. Nach der Entlastung wird anschliessend die Änderung des Messsignals im entlasteten Zustand bewertet.
L
Lagertemperaturbereich
Temperaturbereich in dem der Sensor mechanisch und elektrisch unbeansprucht gelagert werden kann, ohne dass bei der Wiederverwendung des Sensors innerhalb des Betriebstemperaturbereichs eine bleibende signifikante Veränderungen seiner messtechnischen Eigenschaften feststellbar ist.
Lastwiderstand
Minimaler Eingangswiderstand des angeschlossenen Messsystems.
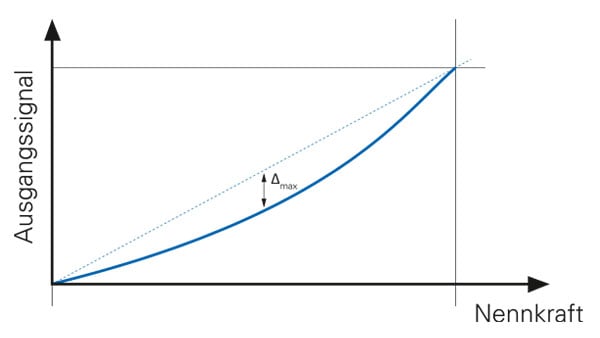
Linearitätsabweichung
Die Linearitätsabweichung ist die maximale Abweichung einer bei zunehmender Kraft ermittelten Kennlinie eines Sensors von der Bezugsgeraden durch den Nullpunkt unter idealen Einbaubedingungen. Die Bezugsgerade ist eine Ausgleichsfunktion ersten Grades, deren Steigung so festgelegt wird, dass die Summe der Quadrate aller Signalabweichungen von der Bezugsgeraden ein Minimum ergibt (in der Literatur: Methode der kleinsten Fehlerquadrate). Hauptursache für eine Linearitätsabweichungen ist oft eine nicht symmetrische Krafteinleitung.
M
Messauflösung
Kleinstmögliche Unterteilung der übertragbaren Messwerte bei digitalen Systemen.
Messrate
Die Messrate beschreibt die interne Abtastrate des analogen Sensorsignals.
Minimale Bruchkraft
Die minimale Bruchkraft beschreibt die Kraft des Kraftsensors, ab der mit einer mechanischen Zerstörung zu rechnen ist. Bei einer Belastung über der minimalen Bruchkraft ist eine Weiterverwendung des Sensors nicht mehr zu empfehlen.
N
Nenndehnung
Die Nenndehnung ist die Dehnung für die der Sensor nominell ausgelegt ist, das heißt, bis zu der die messtechnischen Spezifikationen eingehalten werden. Bei den folgenden Angaben bezieht sich die prozentuale Angabe immer auf die Nenndehnung.
Nennkennwert \(U_{E}\)
Ratiometrisches Ausgangssignal eines passiven Sensors bei Nennkraft. Das Ausgangssignal verhält sich proportional zur Brückenspannung \(U_{E}\) .
Nennkraft
Die Nennkraft ist die Kraft für die der Sensor nominell ausgelegt ist, das heißt, bis zu der die messtechnischen Spezifikationen eingehalten werden. Dabei kann je nach Typ zwischen Zug- und Drucknennkraft unterschieden werden. Bei den folgenden Angaben bezieht sich die prozentuale Angabe immer auf die Nennkraft.
Nennmessweg
Der Nennmessweg beschreibt den Weg den die beiden äußeren Krafteinleitungspunkte bzw. Flächen des Kraftsensors in Messrichtung relativ zueinander infolge einer Belastung mit Nennkraft machen. Der typische Nennmessweg bei Membran Kraftsensor beträgt ca. 0.1 mm.
Nullpunktabweichung
Die Nullpunktabweichung beschreibt die maximale Abweichung des Nullsignals im ausgebauten Zustand vom Wert null bezogen auf den Nennkennwert. Bei Kraftsensoren unter 100 N ist darauf zu achten, dass der Sensor kraftlos auf einer ebenen Fläche aufliegt.
R
Random DIN EN 60068-2-64
Widerstandsfähigkeit des Sensors gegen Schwingen ohne dass der Sensor bleibende signifikante Veränderungen seiner messtechnischen Eigenschaften bis Nennkraft erfährt.
Rauschen
Effektivwert des Rauschens des Ausgangssignals im angegebenen Frequenzbereich.
Reproduzierbarkeit
Die Reproduzierbarkeit beschreibt die Genauigkeit des Sensors bei veränderter Einbaulage. Dabei wird die maximale Differenz der Ausgangssignale bei gleicher Kraft aus mehreren Messreihen in unterschiedlichen Einbaustellung ermittelt. Die Reproduzierbarkeit ist besonders für Kraftsensoren die temporär messend sind und häufig ein- und ausgebaut werden wichtig.
S
Schock DIN EN 60068-2-27
Widerstandsfähigkeit des Sensors gegen Stoßbeanspruchung (mechanische Schocks), ohne dass der Sensor bleibende signifikante Veränderungen seiner messtechnischen Eigenschaften bis Nennkraft erfährt.
Schutzart DIN EN 60529
Die Schutzart gibt an, inwieweit der Sensor gegen Feuchtigkeit und Staub sowie das Eindringen von Fremdkörpern geschützt ist.
Sensorsteifigkeit
Die Sensorsteifigkeit ist definiert als das Verhältnis von Kraft zu axialer Verformung des Sensorkörpers. Mit Hilfe der Sensorsteifigkeit lässt sich die Grundresonanzfrequenz des Sensors entscheidend beeinflussen.
Signalpolarität positiv
Positive Änderung des Ausgangssignals bei definierter Richtung der Eingangsgrösse.
Stromaufnahme
Die maximale Stromaufnahme bei Nennbedingungen, der Einschaltstrom kann dabei für einige ms grösser sein.
T
Tarierbereich
Innerhalb dieses Bereichs ist der Sensor in der Lage eine Tarierung durchzuführen und das Ausgangssignal auf das Nullsignal einzustellen.
Tarierimpuls
Der Tarierimpuls ist minimale Zeit, in der \(U_{Ta}\) überschritten werden muss um eine Tarierung zu starten.
Tarierung aktiv
Diese Spannung muss mindestens an dem Tariereingang anliegen, damit sicher eine Tarierung gestartet wird.
Tarierung inaktiv
Diese Spannung darf an dem Tariereingang nicht überschritten werden, damit sicher keine Tarierung gestartet wird.
Tarierzeit
Diese Zeit benötigt der Sensor maximal um eine Tarierung durchzuführen.
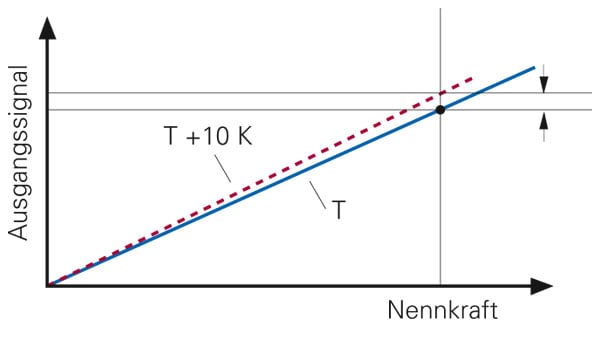
TK Kennwert
\(TK_{E}\) beschreibt die relative Änderung des Kennwerts des Kraftsensors infolge einer Änderung der Umgebungstemperatur \(T_{i}\) um 10 K. Die Angabe erfolgt in % pro 10K.
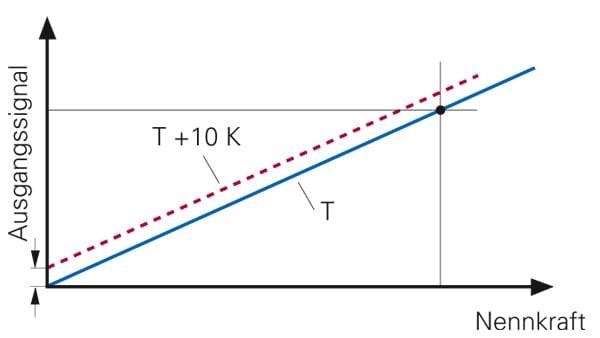
TK Nullsignal
\(TK_{0}\) beschreibt die auf den Nennkennwert bezogene Änderung des Nullsignals des Kraftsensors infolge einer Änderung der Umgebungstemperatur \(T_{i}\) um 10 K. Die Angabe erfolgt in % pro 10K.
Ü
Überlast
Überlast ist die Kraft, bis zu der der Kraftsensor bei einmaliger Belastung weiterhin voll funktionsfähig ist und die technischen Spezifikationen weiterhin einhält. Der Sensor erfährt dabei keine plastische Verformung.
V
Vibration DIN EN 60068-2-6
Widerstandsfähigkeit des Sensors gegen aufgezwungene sinusförmige Schwingbewegungen mit vorgegebenem Schärfegrad, ohne dass dadurch bleibende signifikante Veränderungen seiner messtechnischen Eigenschaften bis Nennkraft feststellbar sind.
W
Wiederholbarkeit
Die Wiederholbarkeit beschreibt die Genauigkeit des Sensors bei unveränderter Einbaulage. Dabei wird die maximale Differenz der Ausgangssignale bei gleicher Kraft aus mehreren Messreihen bei unveränderter Einbaustellung ermittelt. Die Wiederholbarkeit ist besonders für Kraftsensoren die einmalig eingebaut werden wichtig.