Un détecteur à ultrasons est un appareil qui utilise des ondes ultrasonores pour détecter des objets ou mesurer des distances. Dans la technique d' automatisation industrielle, les détecteurs à ultrasons sont utilisés en particulier pour un contrôle précis dans des process de production.
Comment fonctionne un détecteur à ultrasons ?
Les détecteurs à ultrasons mesurent de manière fiable et sans contact les distances dans une plage de mesure définie, indépendamment des caractéristiques de l' objet et des conditions ambiantes, par exemple la présence de la poussière. Pour ce faire, un détecteur à ultrasons émet des ondes à ultrasons à haute fréquence et mesure le temps qu' il les tardent pour être réfléchies par l' objet et retourner au détecteur (principe time-of-flight). Le temps mesuré sert pour calculer la distance entre le détecteur et l' objet à l' aide de la vitesse de propagation du son. De cette manière, les détecteurs à ultrasons détectent la présence et la position d'un objet avec haute précision.
Ici vous trouverez nos détecteurs à ultrasons pour la détection d' objets ainsi que tous les capteurs de distance à ultrasons et les capteurs de niveau à ultrasons.
La plage de mesure des détecteurs à ultrasons varie en fonction du principe de détection, du modèle et des facteurs ambiants: typiquement la portée varie de quelques centimètres à plusieurs mètres. La fréquence et l' amplitude des ondes à ultrasons ainsi que la puissance de l' émetteur et la sensibilité du récepteur sont des facteurs clé de la plage de mesure.
Mesure de la distance
La mesure de la distance se fait par détecter et calculer le temps écoulé entre l' émission et la réception des ondes à ultrasons. Pour calculer la distance on utilise la formule mathématique suivante :
Distance L = (T x C)/2
L est la distance, T le temps écoulé entre l' émission et la réception des ondes à ultrasons, C est la vitesse de propagation du son. Pour obtenir la distance vers l' objet, il faut diviser le résultat calculé par 2, car T est le temps total des ondes (aller et retour).
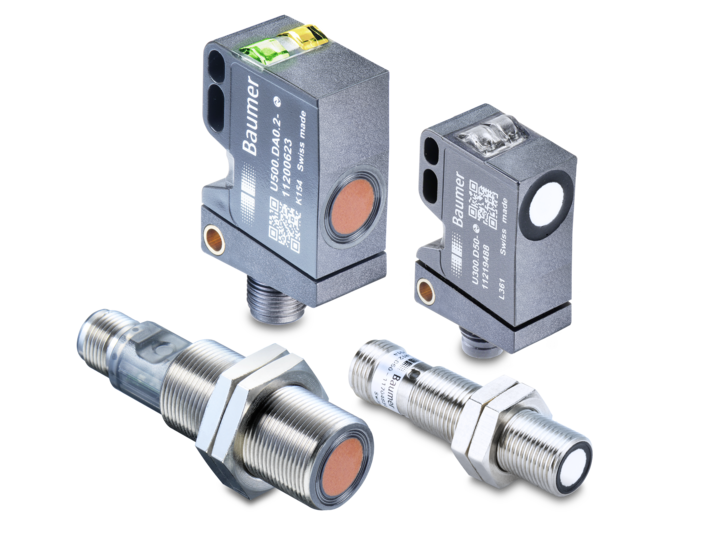
Principes de détection et structure des détecteurs à ultrasons
La plupart des détecteurs à ultrasons reposent sur le principe de la mesure du parcours du son entre l’émission et la réception (détecteurs de proximité). Dans le cas du principe des barrières sera déterminée la distance du détecteur au réflecteur (barrière réflex) ou à un objet (barrière simple) dans la plage de mesure.
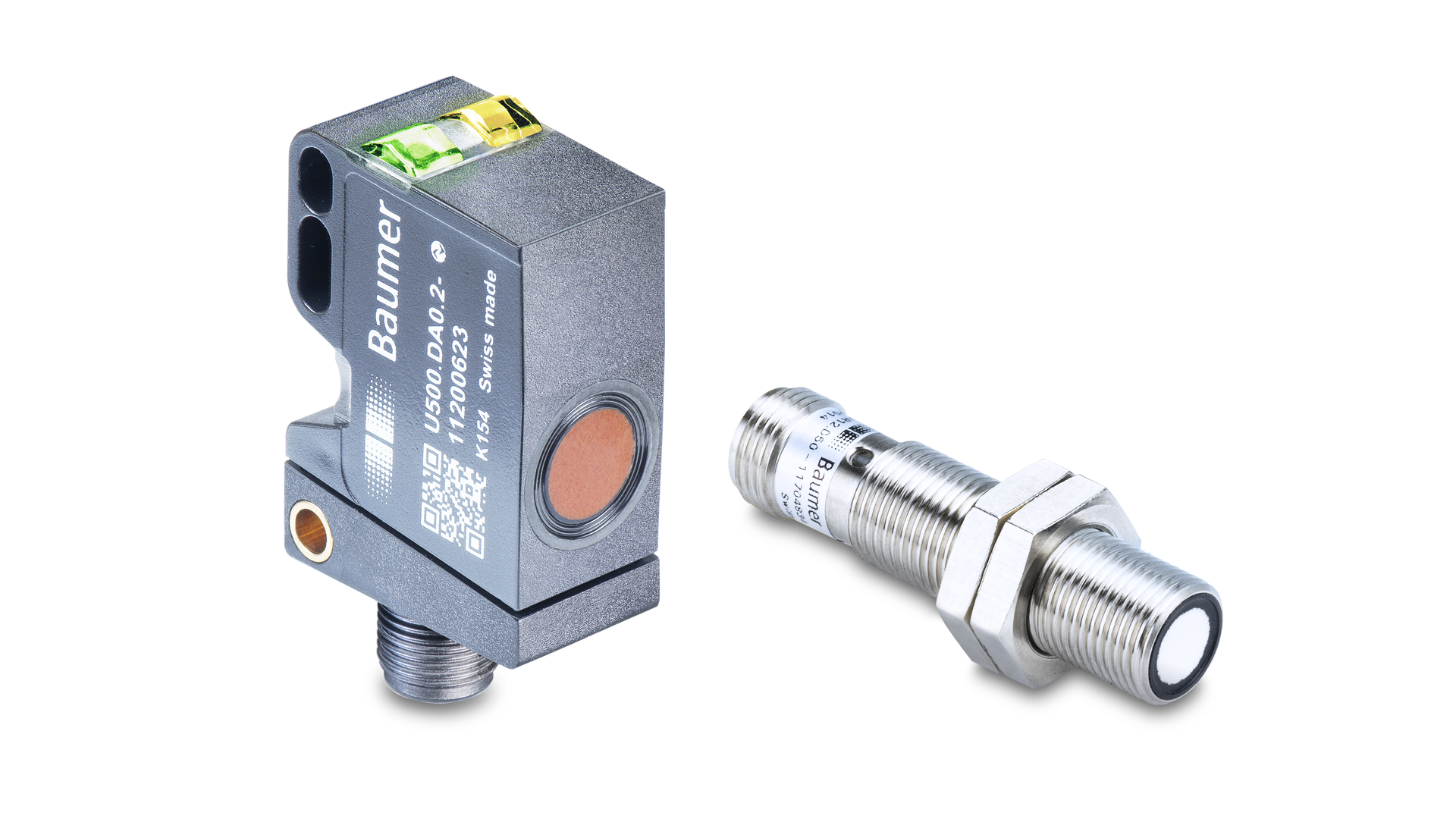
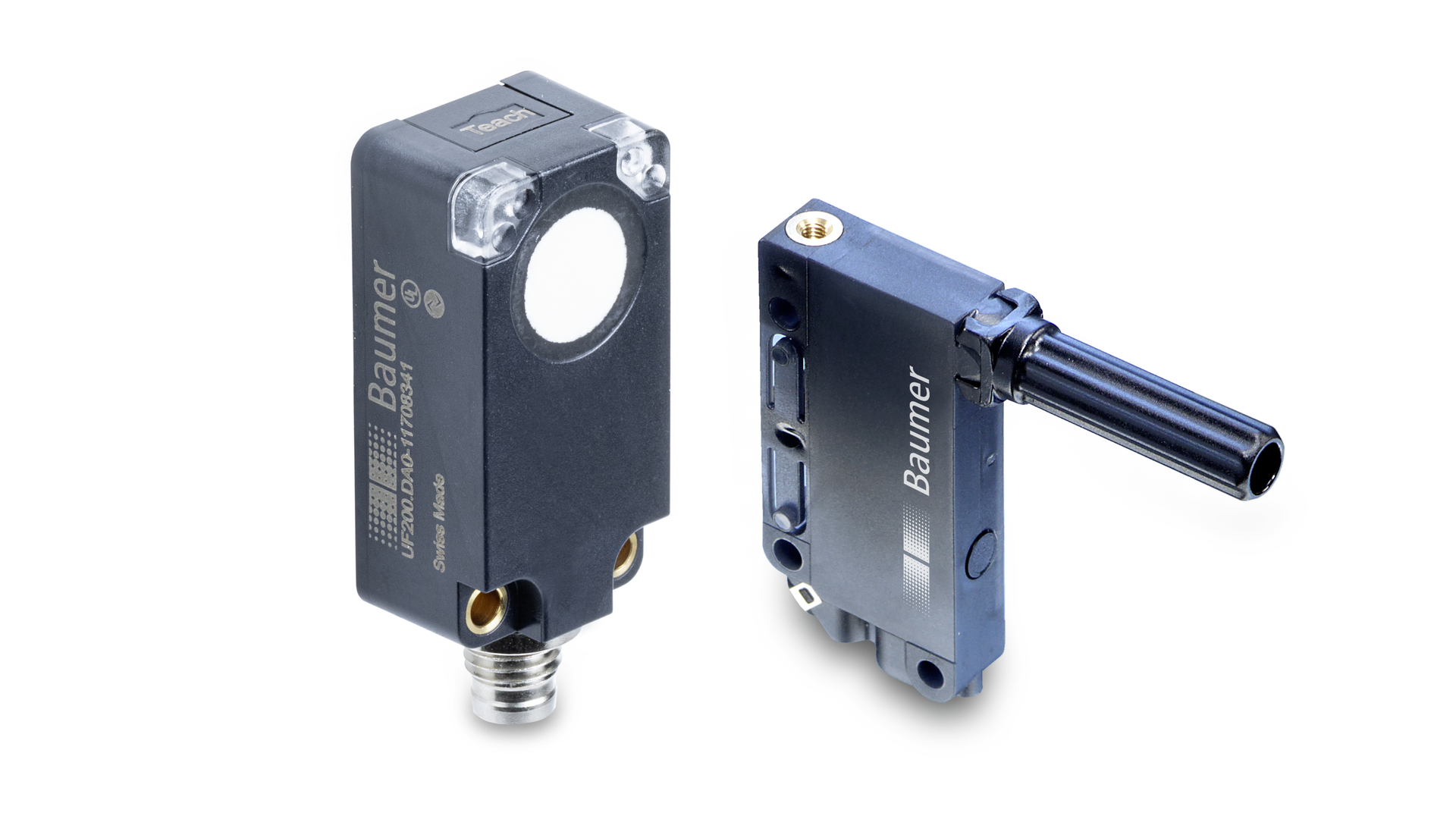
Les détecteurs de proximité à ultrasons représentent la manière la plus simple de détecter des objets par ultrasons. L’émetteur et le récepteur sont intégrés dans un boîtier. Les ultrasons sont directement réfléchis vers le récepteur par l’objet détecté. Les détecteurs à ultrasons avec la fonction « Teach-in» se différencient des types conventionnels par leur capacité d’utilisation plus aisée et plus diversifiée par simple pression sur une touche.
De manière générale, la barrière réflex fonctionne selon le même principe que le détecteur de proximité à ultrasons. La mesure du parcours du son permet de déterminer la distance du détecteur au réflecteur ou à un objet dans la plage de mesure. Chaque objet stationnaire qui réfléchit le son peut donc être utilisé comme réflecteur.
Domaines d'application typiques :
objets positionnés en biais et de forme irrégulière
objets cibles déviant le son
matériaux absorbant le son, comme le coton ou le caoutchouc-mousse
Les barrières simples à ultrasons permettent des temps d'activation courts et des portées élevées. L’émetteur et le récepteur sont intégrés dans deux boîtiers séparés. L’émetteur délivre des ondes sonores en continu que l’air achemine jusqu’au récepteur. Si un objet interrompt les ondes sonores, le récepteur passe automatiquement sur l’étage de sortie.
Domaines d'application typiques :
détection d’objets se succédant rapidement
comptage d’objets en matériaux difficiles à détecter (récipients en verre, bouteilles PET)
surveillance de matériaux transparents
contrôle de déchirures de feuilles
surveillance du niveau de remplissage de réservoirs ou de silos
Dans les détecteurs de proximité à ultrasons, on utilise un convertisseur spécial qui permet au choix d'émettre ou de recevoir les ondes sonores. Le convertisseur émet un certain nombre d'ondes, qui sont réfléchies par l'objet à détecter. Dès la fin de cette émission, le convertisseur est commuté sur la réception. Le temps qui s'écoule jusqu'au retour d'un éventuel écho est proportionnel à la distance entre le détecteur de proximité et l'objet.
Sortie digitale
La détection d'un objet est possible uniquement dans la zone de détection. La distance de détection peut être réglée en continu par l'utilisateur. Si un objet est détecté dans cette zone, l'état de sortie du détecteur va commuter. Une diode lumineuse (LED) indique l'état de sortie.
Détection d'objets
Les ondes sonores sont bien réfléchies par les différentes surfaces. Les objets à détecter peuvent être solides, liquides, granuleux ou poudreux. Les objets transparents ainsi que les objets difficilement détectables par voie optique sont reconnus de façon fiable par les détecteurs à ultrasons.
Objet standard
Toutes les indications se réfèrent à un objet de forme carrée et plate présentant les longueurs d’arêtes suivantes:
15 x 15 mm pour une portée de détection finale Sde jusqu’à 250 mm
30 x 30 mm pour une portée de détection finale Sde jusqu’à 1000 mm
100 x 100 mm pour une portée de détection finale Sde supérieure à 1000 mm
L’objet standard se trouve en position verticale par rapport à l’axe de référence du détecteur.
Dimension
Pour garantir une détection fiable d’un objet, le signal réfléchi par l’objet doit être suffisamment important. L’intensité de ce signal est également fonction de la dimension de l’objet. En présence d’un objet standard défini, la portée de détection Sd peut être utilisée complètement.
Surface
Les objets et les milieux absorbant le son, présentant une surface rugueuse ou poreuse, réfléchissent le son de façon diffuse, entraînant une réduction de la portée de détection des détecteurs à ultrasons. La portée de détection Sd peut être pleinement utilisée si la rugosité maximale de la surface de l’objet ne dépasse pas 0,2 mm.
Objets typiques absorbant les sons:
caoutchouc, mousse
coton / laine / étoffe / feutre
matériaux très poreux
Faisceaux sonores – domaines typiques de commutation
Les domaines de commutation mettent également en évidence l’influence des zones secondaires qui ont pour effet d’augmenter l’angle d’ouverture à proximité immédiate des détecteurs. A cause des phénomènes d’absorption et de diffusion des sons dans l’air, les faisceaux sonores diminuent avec les grandes distances. La dimension, la forme, la structure de la surface ainsi que le sens de progression de l’objet ont une grande influence dans le domaine de détection latérale du détecteur. Les domaines de commutation sont caractéristiques pour une famille complète de détecteurs. Ainsi, par exemple, le profil 100 - 1000 mm est valable pour tous les types présentant ce domaine de détection, aussi bien analogique que numérique.
Mode de mesure
Pour déterminer les domaines typiques de commutation des faisceaux sonores, on utilise des objets standards en acier de forme carrée présentant les longueurs d’arêtes suivantes :
15 x 15 mm pour une portée de détection finale Sde ≤ 250 mm
30 x 30 mm pour une portée de détection finale Sde ≤ 1000 mm
100 x 100 mm pour une portée de détection finale Sde > 1000 mm
Les objets sont disposés perpendiculairement par rapport à l’axe de référence et déplacés latéralement à l’intérieur de la zone de détection. En reliant ensuite les différents points de commutation ainsi mesurés, on obtient les zones typiques de commutation. La forme du faisceau sonore change lors de l’utilisation d’objets ronds ou présentant une géométrie divergente.
Barrières réflex à ultrasons
Principe
La barrière réflex fonctionne selon le même principe que le détecteur de proximité à ultrasons. L'écart entre le détecteur et le réflecteur ou un objet se situant à la portée de détection est déterminé par la mesure du temps de propagation. Tout objet stationnaire réfléchissant le son peut être utilisé comme réflecteur. La portée de détection Sd (distance entre le détecteur et le réflecteur) peut être adaptée aux exigences individuelles à l'aide du potentiomètre intégré. Tant que le temps de propagation du signal à ultrasons correspond à la distance entre le détecteur et le réflecteur, l'appareil reste en veille. Dès qu'un objet se trouve à la portée de détection, ce temps de propagation change et le détecteur est activé. Ce dispositif permet également la détection d'objets absorbant ou déviant le son.
Détection d’objets
Objet standard/réflecteur
Toutes les indications se réfèrent à un objet carré et plat d'une longueur d'arête de 30 mm (Sde > 1000 mm: longueur d'arête 100 mm, Sde ≥ 2500 mm: longueur d'arête 300 mm) disposé perpendiculairement par rapport à l'axe de référence du détecteur. Le réflecteur doit être d'un matériau réfléchissant bien le son et ayant au moins les mêmes dimensions géométriques.
Pour obtenir une détection fiable, le faisceau doit être entièrement couvert, afin qu'aucun son ne puisse être renvoyé par le réflecteur. Le diamètre minimal d'objet nécessaire est de 30 mm pour la URDK 30 et de 100 mm pour URAM 50.
Pour garantir une détection fiable d'un objet, le signal réfléchi doit être suffisamment important. L’intensité de ce signal dépend de la dimension de l'objet. En présence d'un objet standard défini, la portée de détection Sd peut être entièrement utilisée.
Avantages
Détection fiable de matières absorbant à 100% le son
Reconnaissance sûre d'objets déviant le son
Aucune zone aveugle devant le détecteur, avec des objets ≥ à l'objet standard
Barrières simples à ultrasons
Principe
L'émetteur et le récepteur de la barrière simple à ultrasons sont placés dans deux boîtiers séparés. L'émetteur envoi en continu des ondes au récepteur. Si un objet brise ce faisceau d'ondes, l'étage de sortie du récepteur commute. A l'aide du potentiomètre intégré au récepteur, l'utilisateur peut adapter l'intensité nécessaire du signal d'entrée aux objets à détecter. L'état de sortie et l'intensité du signal reçu sont indiqués par une diode lumineuse (LED).
Angle d'ouverture α
L'angle α définit la propagation dans l'espace du champ acoustique conique envoyé par l'émetteur de la barrière à ultrasons.
Reproductibilité
Grâce au faible angle d'ouverture du faisceau sonore de l'émetteur, la reproductibilité du point de commutation S1, pour deux objets qui se suivent dans les mêmes conditions, est inférieure à 3 mm.
Hystérésis
La différence entre le point d'enclenchement S1 et le point de déclenchement S2 est nommée hystérésis. Si un objet brise le faisceau d'ondes, le niveau du signal nécessaire, pour revenir dans l'état de sortie initial, doit être environ 75% plus élevé. Ainsi, des objets se succédant à courts intervalles sont parfaitement détectables.
Capteurs de distance à ultrasons
Principe
Chez les capteurs de distance à ultrasons, le courant ou la tension fourni(e) est proportionnel(le) à la distance vers l' objet détecté. Sur la base de la méthode de l' écho d' impulsion, la valeur de distance mesurée est fournie sous forme de valeur de tension. La pente de la courbe de sortie permet l' adaptation du détecteur par potentiomètre, auto-apprentissage (teach) ou par la fonction qTeach pour une adaptation optimale à la résolution spécifique demandée pour l' application. Pour les applications avec des câbles d' alimentation plus longues ou de fortes interférences, il est recommandé d' utiliser un capteur de distance à ultrasons avec sortie courant.
Où sont utilisés les détecteurs à ultrasons ?
Les détecteurs à ultrasons peuvent tout faire et conviennent à pratiquement tous les projets de détection en environnement industriel. Les objets à détecter peuvent être solides, liquides, granuleux ou pulvérulents. Ils détectent avec fiabilité les objets brillants, transparents ou aux couleurs changeantes. Les performances des détecteurs à ultrasons se remarquent plus particulièrement en environnement difficile, car ils sont extrêmement tolérants à la saleté et la sécurité process ne risque pas d’être entravée par la présence de poussière, de fumée et autre brouillard.
Grâce à leur application polyvalente, on trouve les détecteurs à ultrasons dans des industries variées, comme la technologie d' emballage, d' électronique et de convoyage. Ici vous trouverez d' autres exemples d' utilisation de détecteurs à ultrasons et leurs avantages dans des applications spécifiques.
Applications typiques des détecteurs à ultrasons
Détection sûre de divers matériaux de support, quelle que soit la couleur, soit brillants soit transparents.
Détection fiable sur vers des surfaces d' objets les plus diverses.
Détection de niveau et détection de divers matériaux de différentes formes géométriques.
Apprenez-en plus sur les avantages des capteurs à ultrasons Baumer dans la vidéo suivante :
User de plusieurs détecteurs à ultrasons en parallèle et éliminer toute interférence mutuelle
Pour des résultats optimaux lors de l' opération en parallèle de plusieurs détecteurs à ultrasons et pour éliminer toute interférence mutuelle, appliquer le suivant:
Arrangement spatial : positionner les détecteurs à distance suffisante les uns des autres et sous des angles différents ; si nécessaire, séparer les détecteurs par des cloisons ou des matériaux absorbant le son afin de minimiser toute interférence directe.
Système électronique et logiciel : appliquer des algorithmes de traitement des signaux avancées. Attribuer des codes d' identification uniques au chaque détecteur afin de filtrer les interférences et de garantir que le système réagit aux données du bon détecteur.
Synchronisation et horloge : implémenter des créneaux horaires ou synchroniser l' horloge pour assurer que chaque détecteur transmette et reçoive les signaux dans un intervalle de temps défini , ce que élimine toute superposition de signaux.
Installation de détecteurs à ultrasons
Le montage correct des détecteurs à ultrasons est décisif pour leur performance et leur fiabilité optimisées dans différentes applications, que ce soit pour la mesure précise de distance ou la détection d' objet. En savoir plus sur l' installation et la mise en service des détecteurs à ultrasons.