Montaje de los sensores
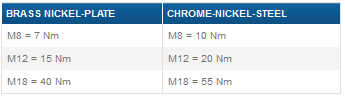
Par máximo de apriete
No se deben exceder los pares de apriete indicados para evitar daños al montar los sensores.
Carcasa cilíndrica con rosca exterior
Los valores reducidos en aproximadamente un 30 % se aplican en el rango del cabezal del sensor.
Carcasa cuadrada con rosca interior
- M2 = 0,1 Nm
- M2,5 = 0,1 Nm
- M3 = 0,3 Nm
Montaje de sensores magnéticos
Tipo de montaje a ras
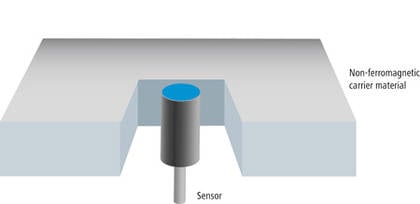
Los sensores de proximidad magnéticos están diseñados para un montaje a ras, lo que significa que la superficie activa del sensor puede estar al mismo nivel que el material de soporte. Sin embargo, el material de soporte no debe ser de material ferromagnético. Si el sensor se monta enrasado en material ferromagnético, la distancia de conmutación se reduce hasta en un 25 %, mientras que, en el caso de un montaje no enrasado (material de soporte ferromagnético retraído por el diámetro de la superficie activa), la distancia de conmutación aumenta hasta en un 25 %.
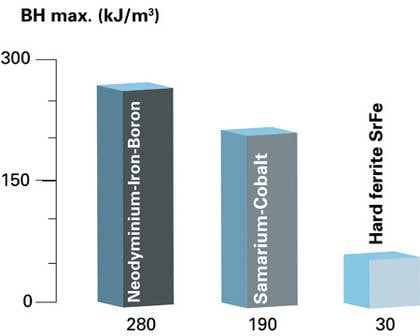
Materiales del imán permanente
La distancia de conmutación de los sensores magnéticos cambia en función del imán utilizado. Aquí no solo importa el tamaño del imán permanente, sino también el material juega. Cuanto mayor sea el producto energético de un material magnético en kJ/m³, más intenso será el campo magnético y mayor será la distancia de conmutación.
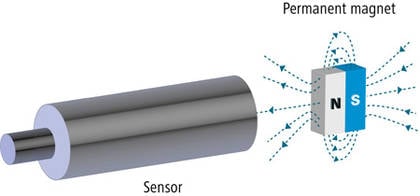
Disposición del imán permanente
En principio, los sensores de proximidad magnéticos no dependen de la polaridad, es decir, el sensor detecta los polos norte y sur del imán permanente. El imán permanente siempre debe montarse con un polo en la dirección del sensor o, en caso contrario, no se puede garantizar una detección fiable.
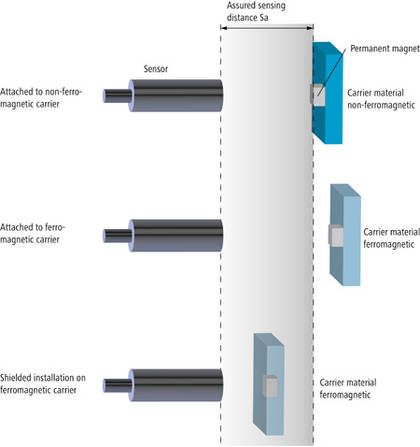
Montaje del imán permanente
El montaje del imán permanente desempeña un papel decisivo en la distancia de conmutación. Si el imán se monta sobre material no ferromagnético, esto influye de forma insignificante en la distancia de conmutación asegurada. Sin embargo, si el imán permanente se monta sobre material ferromagnético (no enrasado), la distancia de conmutación aumenta hasta en un 25 %. En caso de montaje enrasado del imán o en material ferromagnético, la distancia de conmutación se reduce hasta en un 40 % (siempre en comparación con la distancia de conmutación asegurada). En caso de fijación con tornillos, solo se deben utilizar tornillos de material no ferromagnético (por ejemplo, acero inoxidable).
Montaje de sensores cilíndricos magnéticos
Ajuste
Los campos magnéticos de los imanes permanentes en los cilindros se dispersan fuertemente y se especifican de manera diferente para cada tipo de cilindro. Por lo tanto, no es posible determinar mediante datos cuándo responde el sensor. La posición individual correcta del sensor cilíndrico se determina de la siguiente manera:





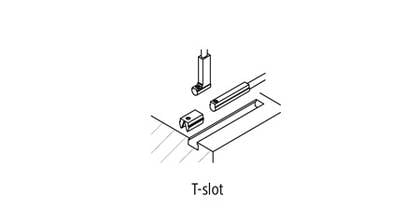
Fijación de cilindros con ranuras
Los cilindros con ranuras integradas están disponibles en el mercado. Normalmente se utilizan ranuras en T o C. Los sensores cilíndricos pueden introducirse en la ranura y fijarse con un tornillo. Los sensores cilíndricos se fijan de forma permanente mediante un tornillo prisionero, que gira hacia abajo en la ranura, o una placa de metal, que se sujeta a ambos lados de la ranura al apretar el tornillo.

Fijación de cilindros redondos o cilindros con tirantes
También se suelen utilizar cilindros redondos o cilindros con tirantes. Estos tipos de cilindros no presentan ranuras para insertar los sensores cilíndricos. Para montar los sensores en estos cilindros, se utilizan abrazaderas o bridas, a las que se pueden fijar los sensores con ranura en C o T.
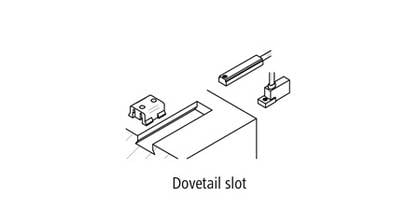
Fijación de formas especiales de ranuras
Con los adaptadores de los accesorios, los sensores con ranura en C también se pueden montar en las ranuras en T. También se dispone de adaptadores para formas especiales de ranura, como ranuras en cola de milano.