A
Ajuste cero activo
Esta tensión debe aplicarse, como mínimo, a la entrada de ajuste cero para que el ajuste cero pueda iniciarse de forma segura.
Ajuste cero inactivo
No debe superarse esta tensión en la entrada de ajuste cero para que no se inicie el ajuste cero.
Alargamiento nominal
El alargamiento nominal constituye la alargamiento para la que se ha concebido nominalmente el sensor, es decir, hasta la cual se cumplen las especificaciones de técnica de medición. En los siguientes datos, el porcentaje siempre hace referencia al alargamiento nominal.
C
Carga
Resistencia de carga máxima de una salida de corriente. La carga representa la resistencia de medición (resistencia de entrada de la tarjeta de medición analógica) para convertir la corriente de señal en una tensión medible.
CEM
Directiva/norma sobre inmunidad a interferencias, emisiones electromagnéticas y radiaciones.
Choque DIN EN 60068-2-27
Resistencia del sensor a los choques (choques mecánicos) sin que el sensor experimente modificaciones significativas permanentes en sus propiedades técnicas de medición hasta la fuerza nominal.
Consumo de corriente
El consumo máximo de corriente en condiciones nominales, la corriente de conexión puede ser mayor durante algunos ms.
D
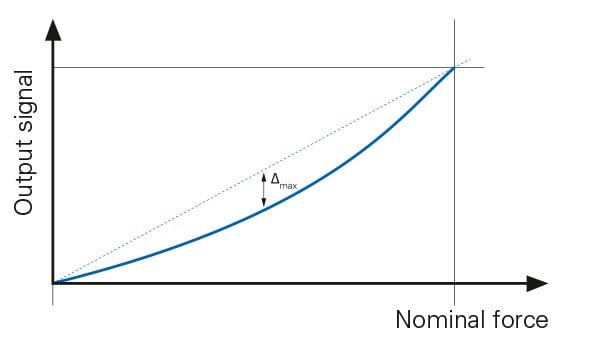
Desviación de linealidad
La desviación de linealidad representa la desviación máxima de una curva característica de un sensor determinada con una fuerza creciente desde la línea recta de referencia a través del punto cero en condiciones ideales de instalación. La línea recta de referencia constituye una función de compensación de primer grado, cuya pendiente se determina de manera que la suma de los cuadrados de todas las desviaciones de la señal de la línea recta de referencia da como resultado un mínimo (en la literatura: método de mínimos cuadrados). La principal causa para una desviación de linealidad suele ser una introducción de fuerza no simétrica.
Desviación del punto cero
La desviación del punto cero describe la desviación máxima de la señal cero en estado desmontado del valor cero en relación con el valor nominal. En el caso de sensores de fuerza por debajo de 100 N, se debe garantizar que el sensor se encuentre sobre una superficie plana sin fuerza.
F
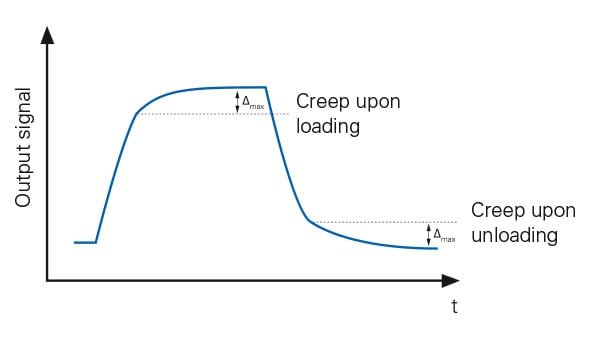
Fluencia
La fluencia describe el cambio dependiente del tiempo en la señal de salida del sensor de fuerza con carga constante. Se distingue entre fluencia de carga y descarga. En caso de fluencia de carga, la modificación de la señal de medición con fuerza constante se examina durante un período de tiempo más largo. En caso de fluencia de descarga, el sensor de fuerza se carga primero con una fuerza nominal constante. Tras la descarga alivio, se evalúa la modificación en la señal de medición en estado de descarga.
Frecuencia de resonancia base
Frecuencia de resonancia con la que el sensor de fuerza descargado oscila sin piezas de introducción de fuerza tras una excitación similar a un choque en la dirección del eje de medición, donde su base prevista para la fijación está acoplada a una masa suficiente.
Frecuencia límite
A esta frecuencia, la señal de salida se amortigua en 3 dB (alrededor del 70,7 %).
Fuerza nominal
La fuerza nominal constituye la fuerza para la que se ha concebido nominalmente el sensor, es decir, hasta la cual se cumplen las especificaciones de técnica de medición. Dependiendo del tipo, se puede diferenciar entre fuerza nominal de tracción y presión. En los siguientes datos, el porcentaje siempre hace referencia a la fuerza nominal.
Fuerza transversal límite
Fuerza transversal estática admisible que, en caso de carga simultánea con fuerza nominal, no provoca modificaciones significativas duraderas en las propiedades de medición del sensor de fuerza.
H
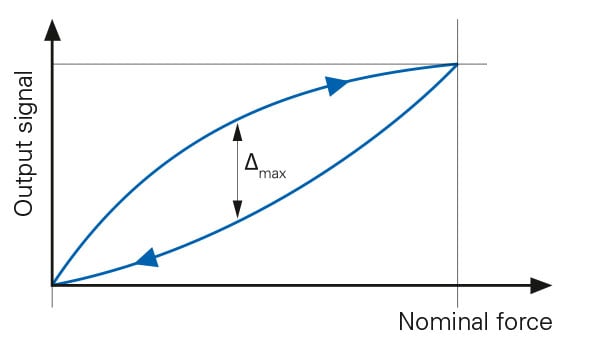
Histéresis
Se conoce como histéresis o intervalo de inversión a la diferencia entre las señales de salida de una serie ascendente y descendente con la misma carga, en relación con la señal de salida con carga creciente en condiciones ideales de instalación. Algunos factores que influyen son la histéresis del material del cuerpo del sensor, la histéresis en el principio de medición y las influencias de fricción externa debido a la estructura de la medición.
I
Impulso de ajuste cero
El impulso de ajuste cero representa el tiempo mínimo en el que se debe superar \(U_{Ta}\) para iniciar el ajuste cero.
M
Momento flector límite
Momento flector estático admisible que, en caso de carga simultánea con fuerza nominal, no provoca modificaciones significativas duraderas en las propiedades de medición del sensor de fuerza.
P
Par límite
Par admisible alrededor del eje de medición del sensor de fuerza que, en caso de carga simultánea con fuerza nominal, no provoca modificaciones significativas duraderas en las propiedades de medición del sensor de fuerza.
Polaridad de señal positiva
Modificación positiva en la señal de salida con una dirección definida de la variable de entrada.
Protección contra la corrosión
La protección contra la corrosión describe la categoría de corrosividad de DIN EN ISO 12944-2 según la cual el sensor se puede utilizar sin problemas en determinadas condiciones ambientales.
Puentes: resistencia de entrada
Resistencia óhmica entre las conexiones de alimentación +VS y -VS de un sensor de medición pasivo.
Puentes: resistencia de salida
Resistencia óhmica entre las salidas de señal Sig+ y Sig- de un sensor de medición pasivo.
R
Rango de ajuste cero
Dentro de este rango, el sensor puede realizar el ajuste cero y configurar la señal de salida a la señal cero.
Rango de temperatura de almacenamiento
Rango de temperatura en el que el sensor puede almacenarse mecánica y eléctricamente sin estrés, sin que se detecte una modificación significativa permanente en sus propiedades técnicas de medición al reutilizar el sensor dentro del rango de temperatura de servicio.
Rango de temperatura de servicio
El rango de temperatura de servicio describe el rango de temperatura en el que el sensor cumple con las propiedades de medición.
Rango de tensión de servicio
En este rango de tensión, el sensor puede funcionar de forma continua en todo el rango de temperatura de servicio sin superar los límites de las propiedades de medición ni deteriorar el circuito de protección eléctrica.
Repetibilidad
La repetibilidad describe la precisión del sensor al no cambiar la posición de instalación. La diferencia máxima entre las señales de salida para la misma fuerza se determina a partir de varias series de mediciones en la misma posición de instalación. La repetibilidad resulta especialmente importante para los sensores de fuerza que se instalan una vez.
Reproducibilidad
La reproducibilidad describe la precisión del sensor al cambiar la posición de instalación. La diferencia máxima entre las señales de salida para la misma fuerza se determina a partir de varias series de mediciones en diferentes posiciones de instalación. La reproducibilidad resulta particularmente importante para los sensores de fuerza que miden temporalmente y que suelen instalarse y retirarse.
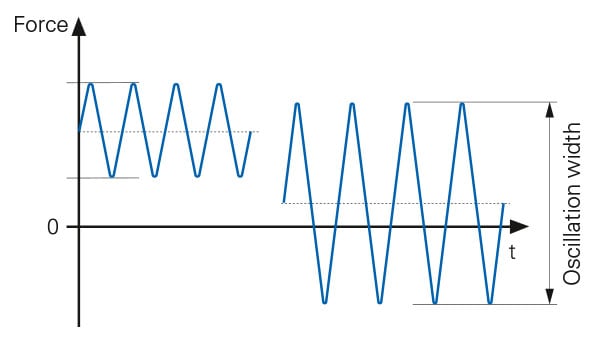
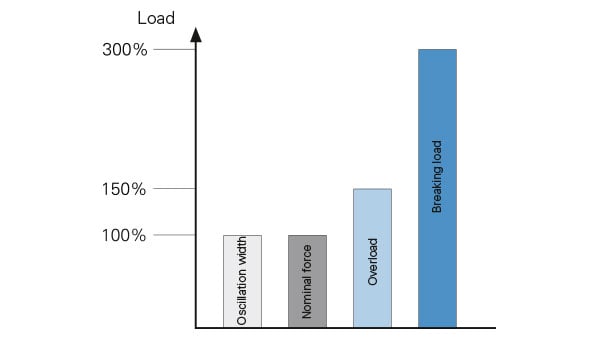
Resistencia a la fatiga
Límite de carga referido a la fuerza nominal hasta el cual el sensor puede detectar al menos más de 1 millón de ciclos de carga dinámicos sin modificaciones permanentes en las propiedades técnicas de medición. En la bibliografía también se puede encontrar con frecuencia bajo el término de amplitud de vibración relativa.
Resistencia de aislamiento
Resistencia óhmica, medida entre cualquier línea de conexión y el cuerpo del sensor en una tensión de prueba definida.
Resistencia de carga
Resistencia de entrada mínima del sistema de medición conectado.
Resistencia del puente
Resistencia óhmica de todo el puente de medición.
Resistencia mínima a la rotura
La mínima fuerza de rotura describe la fuerza del sensor de fuerza a partir de la que se espera una destrucción mecánica. Si la carga excede la fuerza mínima de rotura, no se recomienda seguir utilizando el sensor.
Resolución de medición
La menor subdivisión de los valores de medición transmisibles en sistemas digitales.
Rigidez del sensor
La rigidez del sensor se define como la relación entre la fuerza y la deformación axial del cuerpo del sensor. La frecuencia de resonancia básica del sensor puede verse influenciada por la rigidez del sensor.
Ruido
Valor efectivo del ruido de la señal de salida en el rango de frecuencia especificado.
S
Señal de salida
Tipo de señal de salida del sensor con amplificador eléctrico. La señal de salida es proporcional a la fuerza nominal. En el caso de un sensor de fuerza de 100 N con una salida de tensión de 0-10 V, 0 V 0 N y 10 V se corresponden con una fuerza nominal de 100 N.
Sobrecarga
La sobrecarga representa la fuerza hasta la cual el sensor de fuerza es completamente funcional tras una única carga y continúa cumpliendo con las especificaciones técnicas. El sensor no sufre ninguna deformación plástica.
T
Tasa de medición
La tasa de medición describe la frecuencia interna de muestreo de la señal analógica del sensor.
Tensión de puente
Tensión de alimentación estabilizada para el sensor de medición pasivo.
Tiempo de ajuste cero
El sensor necesita este tiempo máximo para realizar el ajuste cero.
Tipo de protección DIN EN 60529
El tipo de protección indica el nivel de protección del sensor contra la humedad y el polvo, así como contra la entrada de cuerpos extraños.
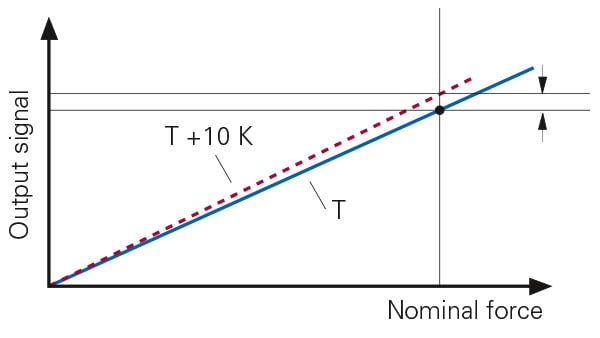
TK del valor característico
\(TK_{E}\) describe la modificación relativa del valor característico del sensor de fuerza como resultado de una modificación de la temperatura ambiente \(T_{i}\) en 10 K. El dato se presenta en % por 10K.
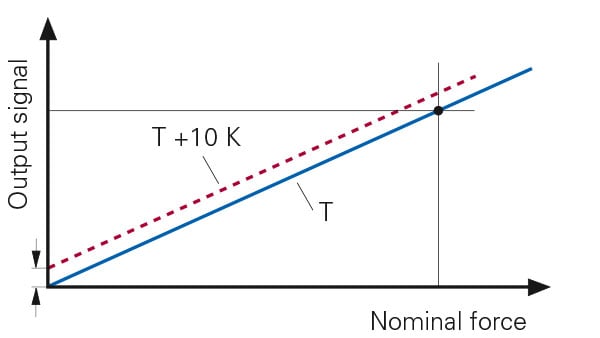
TK de señal cero
\(TK_{0}\) describe la modificación de la señal cero en relación con el valor característico del sensor de fuerza como resultado de una modificación de la temperatura ambiente \(T_{i}\) en 10 K. El dato se presenta en % por 10K.
Tolerancia de valor característico/sensibilidad
Desviación relativa del valor característico bajo carga nominal del valor característico nominal.
Tramo de medición nominal
El tramo de medición nominal describe el tramo que los dos puntos de introducción de fuerza exteriores o las superficies del sensor de fuerza conforman en la dirección de medición como resultado de una carga con fuerza nominal. El tramo típico de medición nominal para un sensor de fuerza con membrana asciende a aprox. 0,1 mm.
V
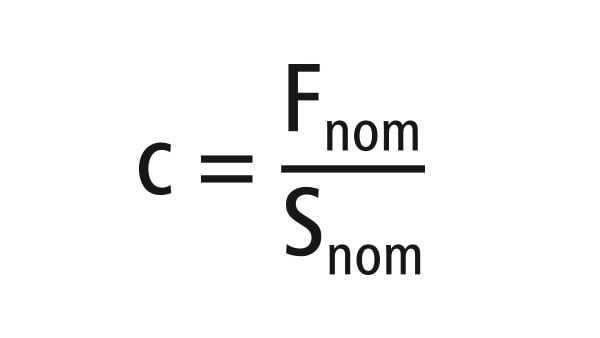
Valor nominal \(U_{E}\)
Señal de salida radiométrica de un sensor pasivo a fuerza nominal. La señal de salida es proporcional a la tensión de puente \(U_{E}\).
Vibración aleatoria DIN EN 60068-2-64
Resistencia del sensor a las vibraciones sin que el sensor experimente modificaciones significativas permanentes en sus propiedades técnicas de medición hasta la fuerza nominal.
Vibración DIN EN 60068-2-6
Resistencia del sensor a movimientos oscilantes sinusoidales impuestos con un grado de intensidad especificado, sin modificaciones significativas permanentes en sus propiedades técnicas de medición hasta la fuerza nominal.