Switzerland
ch
English

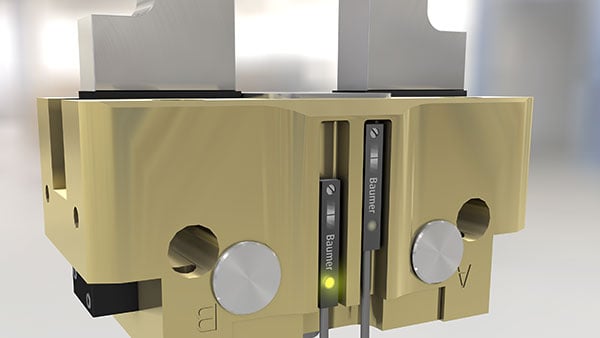
Task: Detecting upper and lower end position of the piston in pneumatic grippers in order to ensure that the piston rod is not broken. The controls will collate the signal with the jaws / fingers open / close signal.