Un sensor de ultrasonidos es un dispositivo que utiliza ondas de ultrasonido para detectar objetos o medir distancias. En la tecnología de automatización industrial, los sensores de ultrasonidos se utilizan particularmente para el control preciso de los procesos de producción.
¿Cómo funciona un sensor de ultrasonidos?
Los sensores de ultrasonidos miden distancias dentro de un rango de medición definido sin contacto y fiablemente, independientemente de las propiedades del objeto y de las condiciones ambientales, como la presencia del polvo. Para ello, un sensor de ultrasonidos emite ondas de sonido de alta frecuencia y mide el tiempo que las tarda para reflejarse en un objeto y volver al sensor (principio time-of-flight). La distancia entre el sensor y el objeto se calcula del tiempo medido y la velocidad de propagación del sonido. De este modo, los sensores ultrasonidos detectan con precisión la presencia y posición de objetos.
Aquí encontrará todos nuestros sensores de ultrasonidos para la detección de objetos, así como todos los sensores de distancia por ultrasonidos y sensores de nivel por ultrasonidos.
El rango de medición de los sensores de ultrasonidos varía en función del principio de detección, del modelo y de los factores ambientales, y suele oscilar entre unos pocos centímetros y varios metros. La frecuencia y la amplitud de las ondas ultrasonidas, así como la potencia del emisor y la sensibilidad del receptor, son factores importantes para el rango de medición.
Medición de la distancia
La distancia se mide por detectar y calcular el tiempo transcurrido desde la emisión hasta la recepción de las ondas ultrasonidas. La distancia puede se calcula mediante la siguiente fórmula:
Distancia L = (T x C)/2
En esta fórmula, L es la distancia, T es el tiempo transcurrido entre la emisión y la recepción de las ondas de sonido y C es la velocidad de propagación del son. Para obtener la distancia al objeto, tiene que dividir el resultado por 2, ya que T es el tiempo total de ir y vuelta de las ondas de sonido.
Principios y estructura de sensores de ultrasonidos
La mayoría de los sensores de ultrasonidos se basan en el principio de medición del tiempo de vuelo del sonido entre la emisión y la recepción (detector de proximidad). El principio de barrera determina la distancia del sensor al reflector (barrera de reflexión) o a un objeto (barrera unidireccional) en el rango de medición.
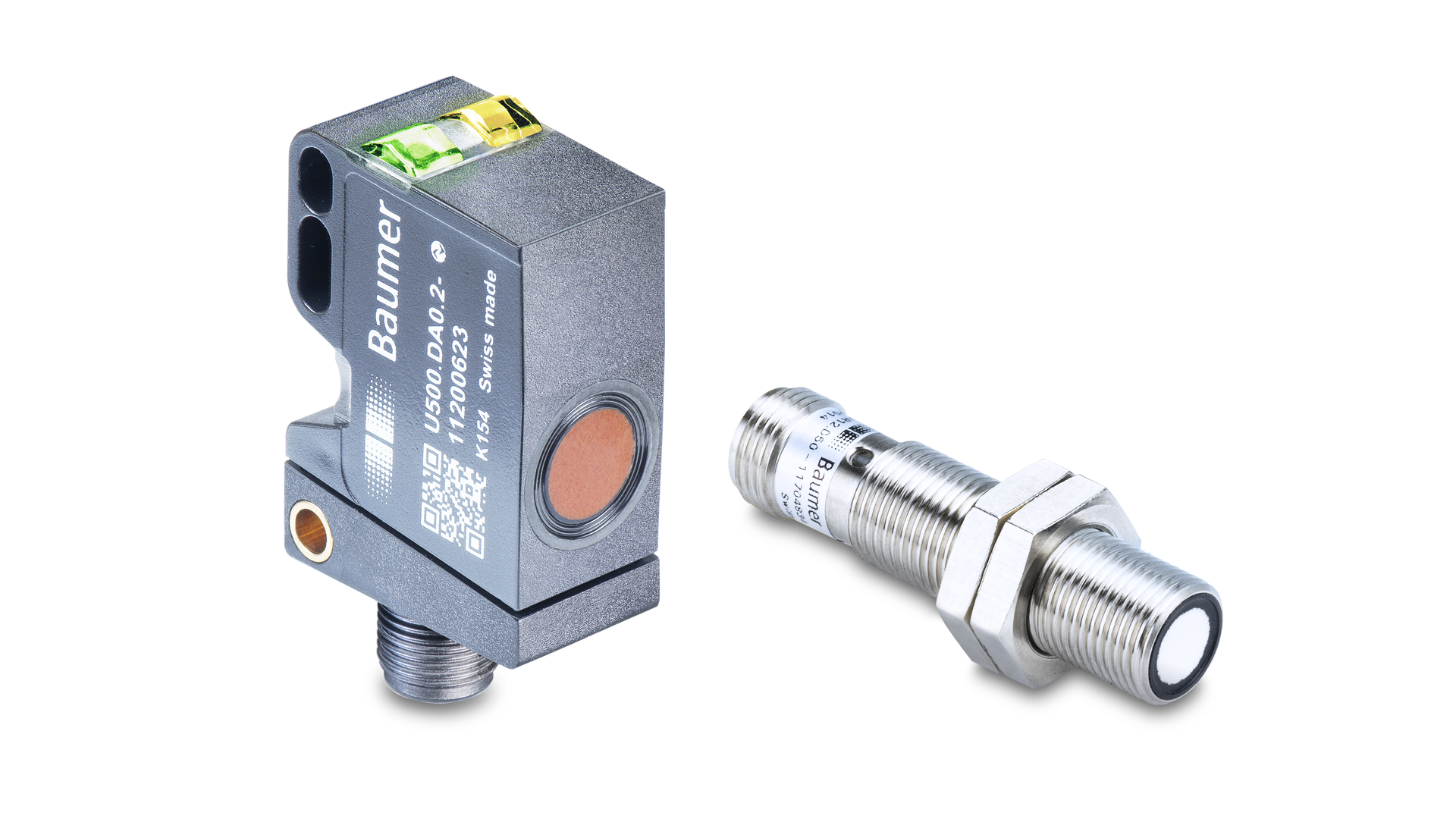
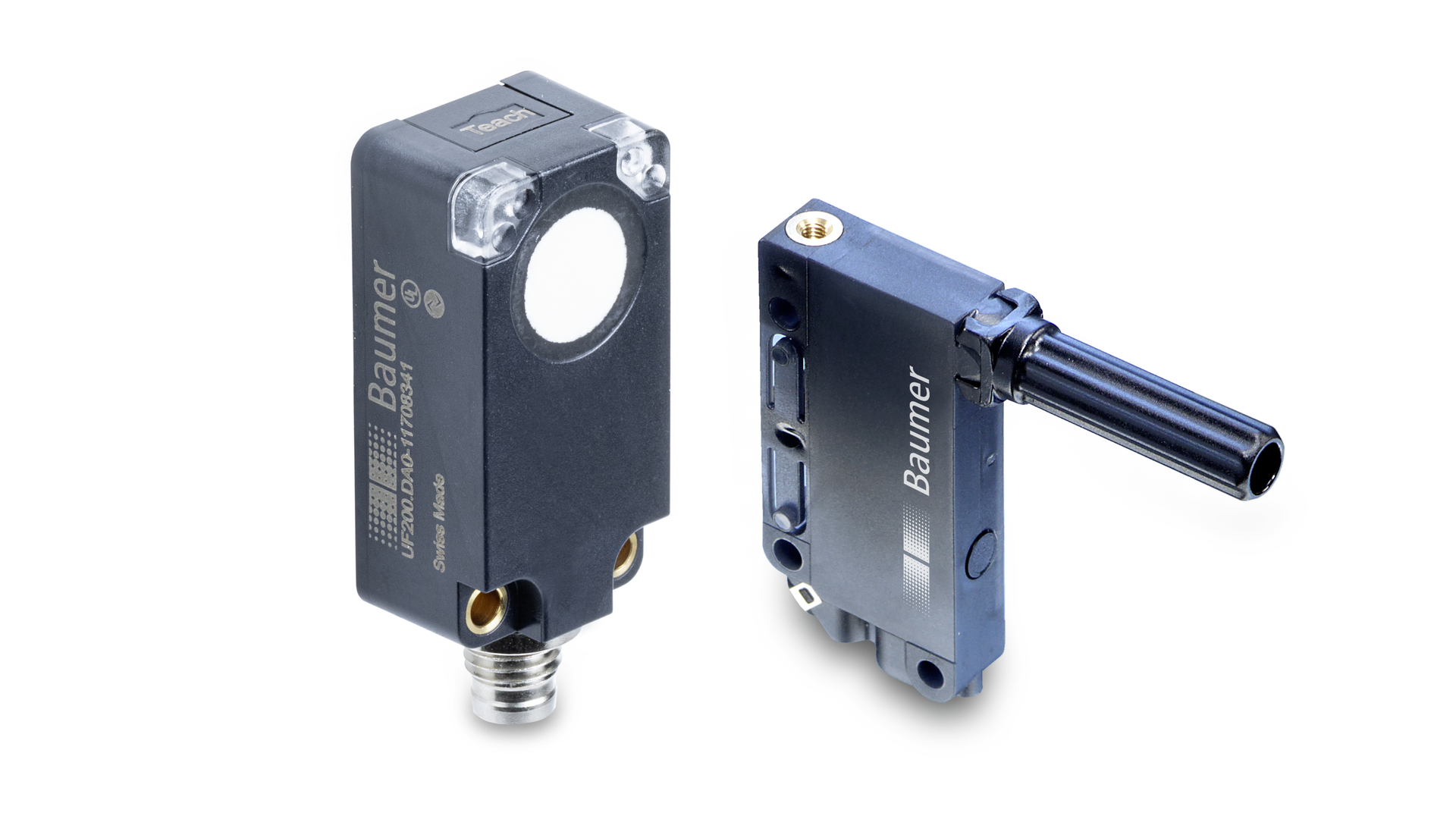
Los sensores de proximidad por ultrasonidos constituyen el tipo más sencillo de detección de objetos por ultrasonidos. El emisor y el receptor están integrados en la misma carcasa. El ultrasonido se refleja directamente desde el objeto al receptor. Los sensores de ultrasonidos con función Teach-in se diferencian de los tipos convencionales en su maniobrabilidad simplificada y versátil con solo presionar una tecla.
A diferencia de los sensores de proximidad por ultrasonidos, las barreras de reflexión por ultrasonidos requieren un reflector estacionario como referencia, que refleje la señal ultrasónica. Un objeto entre el sensor y el reflector de referencia provoca una modificación de la ruta de la señal. Este puede ser, por ejemplo, una distancia medida a través de un objeto que cubre completamente el reflector, un eco adicional a través de un objeto pequeño o una pérdida de eco a través de objetos de gran absorción. Esto activa la conmutación del sensor.
Ámbitos de aplicación típicos:
Objetos inclinados con forma irregular
Objetos que desvían el sonido
Materiales que absorben el sonido, como algodón y gomaespuma
Las barreras unidireccionales por ultrasonidos ofrecen tiempos de respuesta cortos y grandes alcances. El emisor y el receptor están alojados en dos carcasas independientes. El emisor emite continuamente ondas sonoras que llegan al receptor por el aire. Si un objeto interrumpe las ondas sonoras, el receptor pasa por la etapa de salida.
Ámbitos de aplicación típicos:
Detección de objetos en rápida sucesión
Recuento de objetos de materiales difíciles de detectar (envases de vidrio, botellas PET)
Se utiliza un transductor acústico especial en el sensor de proximidad por ultrasonidos, el cual permite el envío y la recepción de ondas. El transductor envía cierta cantidad de ondas, las cuales refleja el objeto a detectar. Tras enviar el pulso, el sensor de ultrasonidos pasa al modo de recepción. El tiempo hasta la llegada de un posible eco es proporcional a la distancia entre el objeto y el sensor de proximidad.
Salida digital
La detección de objetos solo es posible dentro del rango de medición. El usuario puede ajustar la distancia de conmutación con un potenciómetro o puede programarse con Teach-in. Si se detecta un objeto dentro de la distancia ajustada, cambia el estado de conmutación del sensor. Un led integrado informa sobre la detección de un objeto.
Detección de objetos
Las ondas se reflejan bien en diferentes superficies. Los objetos a detectar pueden ser sólidos, líquidos, granulados o pulverulentos. Los objetos transparentes y otros visualmente difíciles de detectar se detectan con sensores de ultrasonidos.
Objeto estándar
Toda la información hace referencia a un objeto cuadrado plano con las siguientes longitudes de borde:
15 x 15 mm en caso de Sde hasta 250 mm
30 x 30 mm en caso de Sde hasta 1000 mm
100 x 100 mm en caso de Sde > 1000 mm
El objeto estándar es perpendicular al eje de referencia del sensor.
Tamaño
La señal reflejada debe ser lo suficientemente grande para garantizar una detección de objetos segura. La intensidad de la señal reflejada también depende del tamaño del objeto. En caso de un objeto estándar definido, el rango de detección Sd se puede utilizar por completo.
Superficie
Los objetos que absorben el sonido y los medios con superficies rugosas o porosas reflejan el sonido de manera difusa y, por lo tanto, reducen el rango de medición de los sensores de ultrasonidos. El rango de detección Sd se puede utilizar por completo si la rugosidad máxima de la superficie del objeto no supera los 0,2 mm.
Los objetos típicos que absorben el sonido son:
Gomaespuma
Algodón/lana/tejido/fieltro
Materiales muy porosos
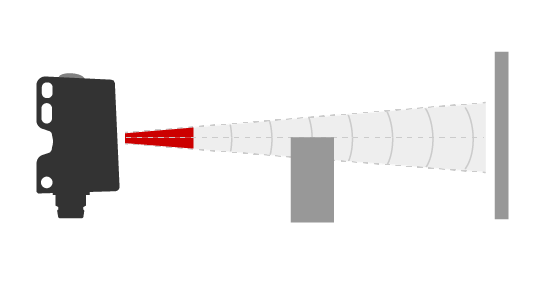
Haces sónicos típicos
Los haces de sonido enumerados en las páginas de datos muestran el rango de detección efectivo de los sensores de ultrasonidos. Los haces de sonido también ilustran la influencia de los haces laterales, que amplían el ángulo de apertura de los sensores. Debido a la absorción y difusión del sonido en el aire, los haces de sonido se reducen en caso de mayores distancias.
Los haces de sonido son típicos de toda una familia de sensores. El perfil 100-1000 mm se aplica, por ejemplo, a todos los tipos con este rango de detección: analógico y digital.
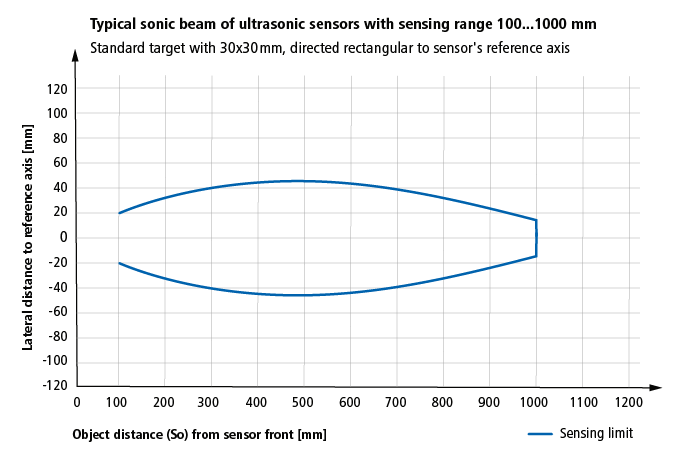
Método de medición
Se utilizan objetos estándar cuadrados de acero con las siguientes longitudes de borde para determinar los típicos haces de sonido:
15 x 15 mm en caso de Sde ≤ 250 mm
30 x 30 mm en caso de Sde ≤ 1000 mm
100 x 100 mm en caso de Sde > 1000 mm
Los objetos se desplazan al rango de detección en ángulo recto con respecto al eje de referencia del sensor y lateralmente a varias distancias. Los haces típicos de sonido se generan conectando posteriormente los puntos de conmutación medidos. La forma del haz de sonido cambia cuando se utilizan objetos redondos u otras geometrías diferentes.
Barreras de reflexión por ultrasonidos
Funcionamiento
Básicamente, la barrera de reflexión funciona conforme al mismo principio que el sensor de proximidad por ultrasonidos. A diferencia de los sensores de proximidad, requieren un reflector que refleje la señal ultrasónica. Cualquier objeto estacionario que refleje el sonido se puede utilizar como reflector (por ejemplo, una cinta transportadora, una pared, etc.). Si un objeto interrumpe el tramo entre el sensor y el reflector, el sensor ya no detecta el reflector y cambia la señal en la salida de conmutación.
Detección de objetos
Objeto estándar/reflector
Toda la información hace referencia a un objeto cuadrado plano con una longitud de borde de 30 mm (Sde > 1000 mm: longitud de borde de 100 mm, Sde ≥ 2500 mm: longitud de borde de 300 mm), que esté en posición perpendicular al eje de referencia del sensor. El reflector debe estar confeccionado con material que refleje el sonido con, al menos, las mismas dimensiones geométricas.
La señal reflejada debe ser lo suficientemente grande para garantizar una detección de objetos segura. La intensidad de la señal reflejada depende del tamaño del objeto. En caso de un objeto estándar definido, la distancia de medición Sd se puede utilizar por completo.
Ventajas
Detección perfecta de hasta un 100 % de materiales que absorben el sonido
Detección fiable de objetos que desvían el sonido
Sin área ciega frente al sensor en el caso de objetos que son ≥ objetos estándar
Barreras unidireccionales por ultrasonidos
Funcionamiento
En el caso de barreras unidireccionales por ultrasonidos, el emisor y el receptor están alojados en dos carcasas independientes. El emisor emite continuamente ondas sonoras que llegan al receptor por el aire. Si un objeto interrumpe las ondas sonoras, el receptor pasa por la etapa de salida.
Con el potenciómetro integrado en el receptor, el usuario puede ajustar con precisión la intensificación necesaria de la señal de entrada a los objetos a detectar. El estado de salida y la intensidad de la señal recibida se indican mediante un led.
Ángulo de apertura α
El ángulo de apertura α define la extensión espacial del haz de sonido cónico emitido por el emisor de la barrera ultrasónica.
Repetibilidad
Debido al reducido ángulo de apertura del haz de sonido del emisor ultrasónico, la repetibilidad del punto de conmutación S1 para dos objetos seguidos en condiciones idénticas es mejor que 3 mm.
Histéresis
La histéresis define la diferencia entre el punto de encendido S1 y el punto de apagado S2. Si un objeto de medición atraviesa el haz de sonido, se requiere un nivel de señal aproximadamente un 75 % superior para un restablecimiento claro de la señal de salida. Por lo tanto, los objetos seguidos se reconocen de forma clara.
Sensores de distancia por ultrasonidos
Funcionamiento
Con los sensores de distancia por ultrasonidos, la corriente o tensión emitida es proporcional a la distancia del objeto a detectar. El valor de distancia medido se emite como valor de tensión (principio pulso-echo). En función del sensor, la inclinación de la curva de salida se puede modificar mediante potenciómetro, Teach-In o qTeach y adaptar de manera óptima a la resolución requerida en la aplicación. Para aplicaciones con líneas de alimentación largas o si hay fuerte interferencia, se recomienda usar un sensor de distancia por ultrasonidos con salida de corriente.
¿Dónde se utilizan los sensores de ultrasonidos?
Los sensores de ultrasonidos son los sensores más todoterreno y son adecuados para casi todas las tareas de detección en entornos industriales. Los objetos a detectar pueden ser sólidos, líquidos, granulados o pulverulentos. Detectan de forma fiable objetos brillantes, transparentes o que cambian de color. El rendimiento de los sensores de ultrasonidos resulta particularmente evidente en entornos duros, ya que son extremadamente tolerantes a la suciedad y la seguridad del proceso no se ve afectada por el polvo, el humo, la niebla o similares.
Debido a la amplia gama de aplicaciones posibles, los sensores de ultrasonidos se utilizan en diversas industrias, como la tecnología de envasado, de electrónica y de alimentación. Aquí encontrará más ejemplos de aplicación de sensores de ultrasonidos y sus ventajas en aplicaciones concretas.
Aplicaciones típicas de los sensores de ultrasonidos
Detección fiable de diversos sustratos independientemente de su color, brillo o transparencia.
Detección fiable de objetos con una gran variedad de estructuras superficiales.
Detección de nivel de materiales con diferentes geometrías.
Descubra más sobre las ventajas de los sensores de ultrasonidos de Baumer en el siguiente vídeo:
Uso de varios sensores de ultrasonidos en paralelo y cómo evitar la interferencia mutua
Para obtener resultados óptimos en el funcionamiento en paralelo de varios sensores de ultrasonidos, tenga en cuenta lo siguiente para evitar errores de detección por la interferencia mutua:
Disposición espacial: Colocar los sensores a suficiente distancia unos de otros y en ángulos diferentes; si necesario, utilizar paredes de separación o material que absorba el sonido entre los sensores para minimizar toda interferencia directa.
Sistema electrónico y software: Aplicar algoritmos avanzados para el procesamiento de señales y atribuir a cada sensor un código de identificación inequívoco para filtrar las interferencias y garantizar que el sistema responderá a los datos del sensor previsto.
Sincronización y reloj: Implementar franjas horarias o sincronización disparada para que todo sensor transmita y reciba datos dentro de un intervalo de tiempo especificado para evitar el solapamiento de señales.
Montaje de los sensores de ultrasonidos
La instalación profesional de sensores de ultrasonidos es crucial para un rendimiento óptimo con fiabilidad en diversas aplicaciones, ya sea para la medición precisa de distancia o la detección de objetos. Más información sobre la instalación y puesta en funcionamiento de sensores de ultrasonidos.