Venezuela
ve
English

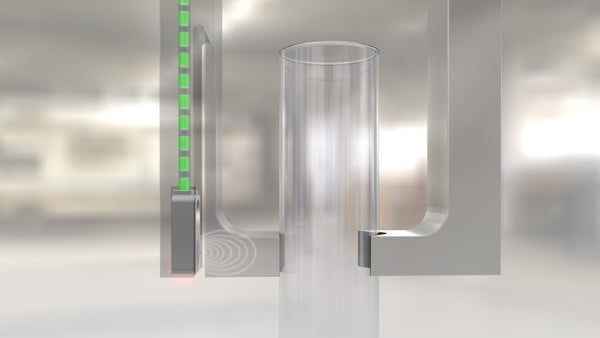
Task: Indirect measurement of the gripping force by measuring displacement/ flex of the adequately designed finger during gripping.