How do you measure force?
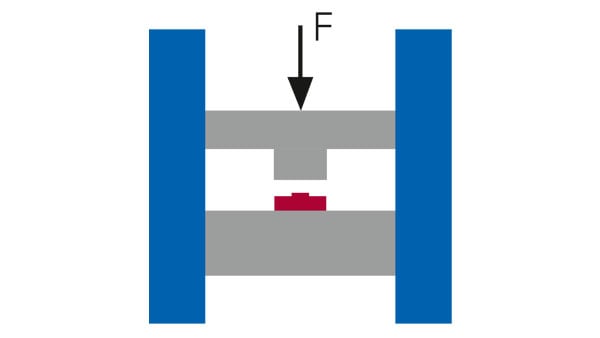
To measure force with force sensors, the force sensor should be positioned in such a way that the entire force flows through the sensor and the force sensor is directly in the force flow. The centric application of force and a sufficiently rigid contact surface are important here.
How does a force sensor work?
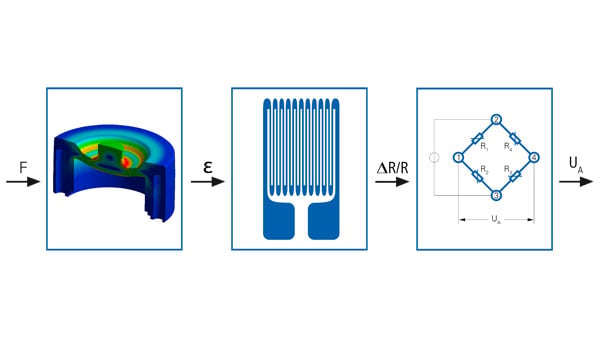
With strain gauge-based force sensors, the processing of the mechanical variable into the electrical signal takes place in three steps. The starting point of any force sensor with strain gauges is a patterned metal foil, on which external loads cause strain on the surface of the material.
Important advantages of strain gauge-based force sensors are:
- Strain gauges as a proven and cost-effective technology for force sensors
- High accuracy level and excellent linear and hysteresis behavior
- Very good temperature compensation by connecting the strain gauges to the Wheatstone bridge circuit
- Measurement of static and dynamic loads possible
- High fatigue strength through the selection of suitable materials for the sensor body, and high vibration resistance of the strain gauges
- Very good long-term stability
Patterned metal foil - Mechanical converter
The starting point for any force sensor is the patterned metal foil, which is deformed due to the application of force. The advantage here is that the deformation is purely elastic. The deformation takes place within the elasticity limit so that after the load has been applied, the patterned metal foil returns to its original shape under zero load.
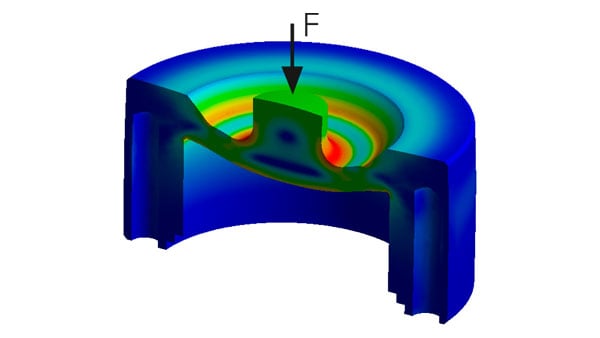
Design and fatigue strength
The challenge in the design and layout of the patterned metal foil lies in the conflict between the softest possible structure for good measurement performance and a restricting material limit. With the help of complex computer-aided FEM simulations, the patterned metal foil is designed for the highest possible strain within the elasticity limit. The aim is to create as homogeneous a zone as possible, to which the strain gauge can then be applied. With the subsequent strength assessment in accordance with the recognized FKM guideline, the fatigue strength of the force sensors is guaranteed. This means that force sensors by Baumer can be dynamically loaded up to their nominal force even in continuous operation with over 1 million load cycles.
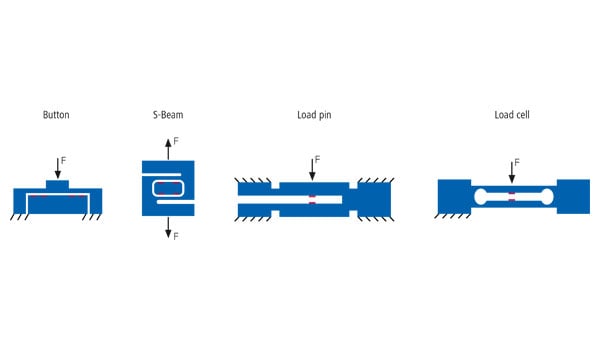
Construction types
Baumer force sensors are usually designed with diaphragm metal foil. A decisive advantage is their very small dimensions, as well as their cost-effective production. In addition, diaphragm force sensors can usually be hermetically sealed very well and can therefore also be used in demanding environments. Other possible designs are, for example, S-shaped metal foils, cylindrical metal foils or bending beams.
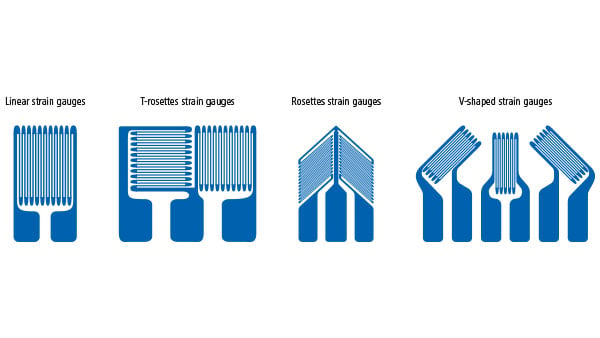
Strain gauges - Mechanoelectrical converter
Strain gauges are the core element of Baumer force and strain sensors and are used to measure the strains on the material surface. As a rule, they consist of a carrier film (polyimide), a zigzag-shaped measuring grid made of constantan, and a top layer. The strain gauges convert the mechanical strain into a change in electrical resistance and act as mechanical-electrical converters. The change in the resistance of the strain gauges is proportional and is referred to as the K factor.
Wheatstone bridge circuit
The Wheatstone bridge circuit is a special circuit of electrical resistors that allows the precise measurement of changes in electrical resistance. In the full bridge circuit used in sensor construction, four strain gauges are always connected to each other in a certain arrangement. The bridge circuit consists of two voltage dividers connected in parallel, which are supplied with the bridge power UB from a common voltage source.
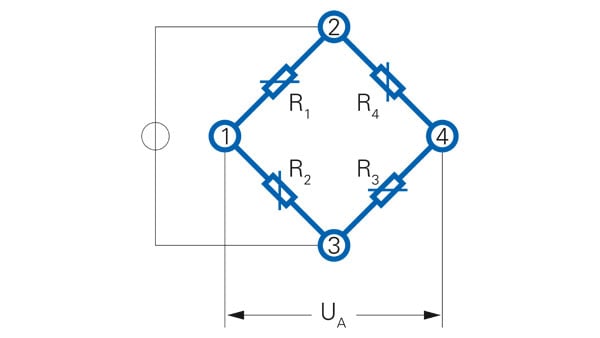
The smallest changes in resistance can be detected precisely with the help of the Wheatstone bridge circuit. The changes in the individual resistance values lead to a bridge offset UA, which can easily be measured. The measuring signal of the bridge is ratio-metrical and is proportional to the supply voltage. The typical measuring signal of strain gauge force sensors is between 0.4 and 3.0 mV/V.
Bridge Amplifier - Electrical Converter
The bridge amplifier supplies the Wheatstone bridge with a stable supply voltage. The resulting output signal of the bridge is amplified and shown either as an analog display (voltage output/current output) or through a digital interface (CAN/ IO-Link). Baumer bridge amplifiers are currently available with a voltage output of ± 10 V DC and a current output of 4...20 mA.
Physical basics of force measurement
What is force and how is it calculated?
The force F with the unit Newton [N] is the product of the mass m in kg of a body and the acceleration due to gravity g in m/s2.
This results in a force of 1,000 N for a mass of 100 kg. As a simple approximation, g = 10 m/s2 is used in practice for the acceleration due to gravity.
What is expansion and how is it calculated?
As soon as a force is applied to a body, it undergoes compression in the case of a compressive force and elongation in the case of a tensile force. This relative change in length is described as expansion ε in [µm/m] and is defined as the ratio of an absolute change in length Δ l to a total length l0.
Modulus of elasticity (MOE)
The actual elongation of a component depends not only on the geometry and the force but also on the material of the component. The decisive characteristic value is the modulus of elasticity. This describes the proportional relationship between tension and expansion during the deformation of a solid body in the linear elastic range. The following applies: the stiffer a material is, the higher its modulus of elasticity. The modulus of elasticity for the standard stainless steel used in transducer construction is E = 200'000 N/mm2 and for aluminum 70'000 N/mm2.
From force to expansion
Each component subjected to a force F also simultaneously experiences a certain expansion ε, as described above. This expansion is always dependent on the modulus of elasticity of the material E, the cross-section A of the material, and the force. Using these three parameters, the expansion can be calculated as follows:
The corresponding component stress σ is calculated as follows:
K factor
The K factor of a strain gauge describes the sensitivity of the strain gauge. It is the linear relationship between the relative change in resistance and the expansion of a material.
A typical K factor for strain gauges is 2.05 for constantan grids.
The Wheatstone bridge equation
With the help of the expansion and the K factor, the expected measuring signal can finally be calculated with the help of a Wheatstone bridge equation. With a typical bending beam, the measuring signal is calculated as follows:
It should be noted that two strain gauges react to tension and two strain gauges to compression. Ideally, the amount of expansion is identical at all measuring points.
Distinction from weight measurement
Again and again, project managers or development engineers are commissioned to carry out weight measurements on construction machinery or the like. Physically, there are no specific differences between force sensors and load cells. The only difference between the is the calibration of the sensors. Unlike load cells, force sensors are always calibrated to a defined nominal force in N instead of a defined weight in kg. Baumer sensors are calibrated as force sensors and are used to measure force.
Standard for force sensors
Characteristic values for force sensors are defined in the VDI 2638 directive. The definitions in the directive make it possible to create a common language basis for force sensors to allow the comparison of technical data. Further information on the individual characteristic values can also be found in our force measurement glossary.